This is an old revision of the document!
Contact: Vladyslav Usenko.
Abstract
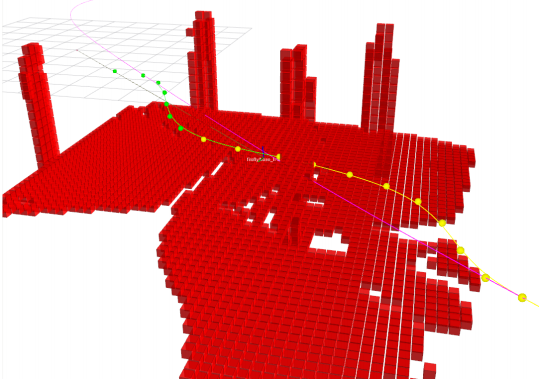
In this work we present a real-time approach for local trajectory replanning for MAVs. Current trajectory generation methods for multicopters achieve high success rates in cluttered environments, but assume the environment is static and require prior knowledge of the map. In our work we utilize the results of such planners and extend them with local replanning algorithm that can handle unmodeled (possibly dynamic) obstacles while keeping MAV close to the global trajectory. To make our approach real-time capable we maintain information about the environment around MAV in an occupancy grid stored in 3D circular buffer that moves together with a drone, and represent the trajectories using uniform B-splines. This representation ensures that trajectory is sufficiently smooth and at the same time allows efficient optimization.