
Weirong Chen
PhD StudentTechnical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Tel: +49-89-289-17763
Fax: +49-89-289-17757
Office: 02.09.038
Mail: weirong.chen@tum.de
Homepage: Personal Website
About
My research interests focus on visual localization, 3D/4D reconstruction, and neural scene representations and understanding. I am also broadly interested in object-level perception, egocentric vision, and developing algorithms for robotics and mixed reality applications.
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2023
[] 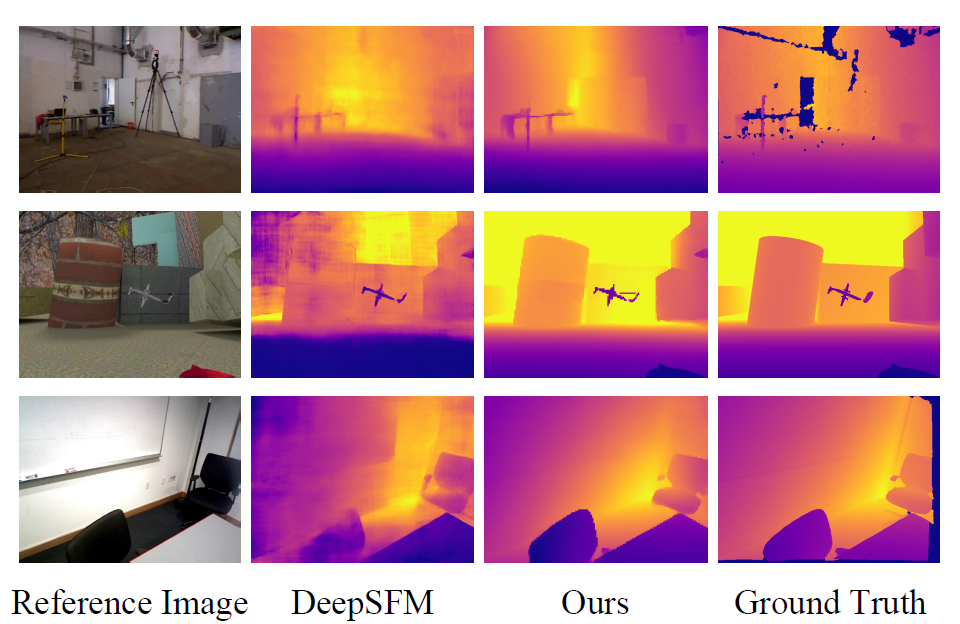
Uncertainty-driven dense two-view structure from motion , In IEEE Robotics and Automation Letters (RA-L) and IROS 2023, IEEE, volume 8, 2023.
Preprints
2024
[] 
DynSUP: Dynamic Gaussian Splatting from An Unposed Image Pair , In arXiv preprint arXiv:2412.00851, 2024.
Conference and Workshop Papers
2026
[] 
NOVA3R: Non-pixel-aligned Visual Transformer for Amodal 3D Reconstruction , In The Fourteenth International Conference on Learning Representations (ICLR), 2026. ([Project Page])
2025
[] 
CoProU-VO: Combining Projected Uncertainty for End-to-End Unsupervised Monocular Visual Odometry , In 47th German Conference on Pattern Recognition (GCPR), 2025. ([project page])
Oral Presentation - Best Paper Award [] 
Back on Track: Bundle Adjustment for Dynamic Scene Reconstruction , In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025. ([project page])
Best Paper Candidate [] 
AnyCam: Learning to Recover Camera Poses and Intrinsics from Casual Videos , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025. ([project page])
2024
[] 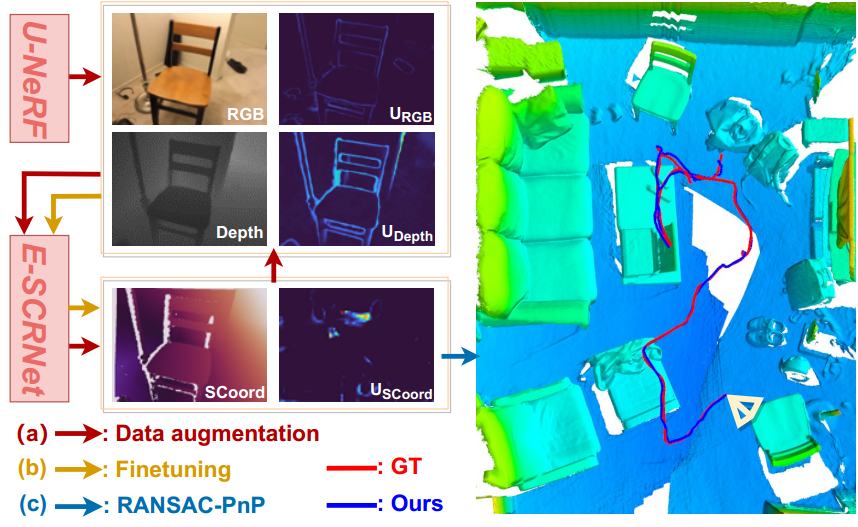
Leveraging neural radiance fields for uncertainty-aware visual localization , In IEEE International Conference on Robotics and Automation (ICRA), 2024.
[] 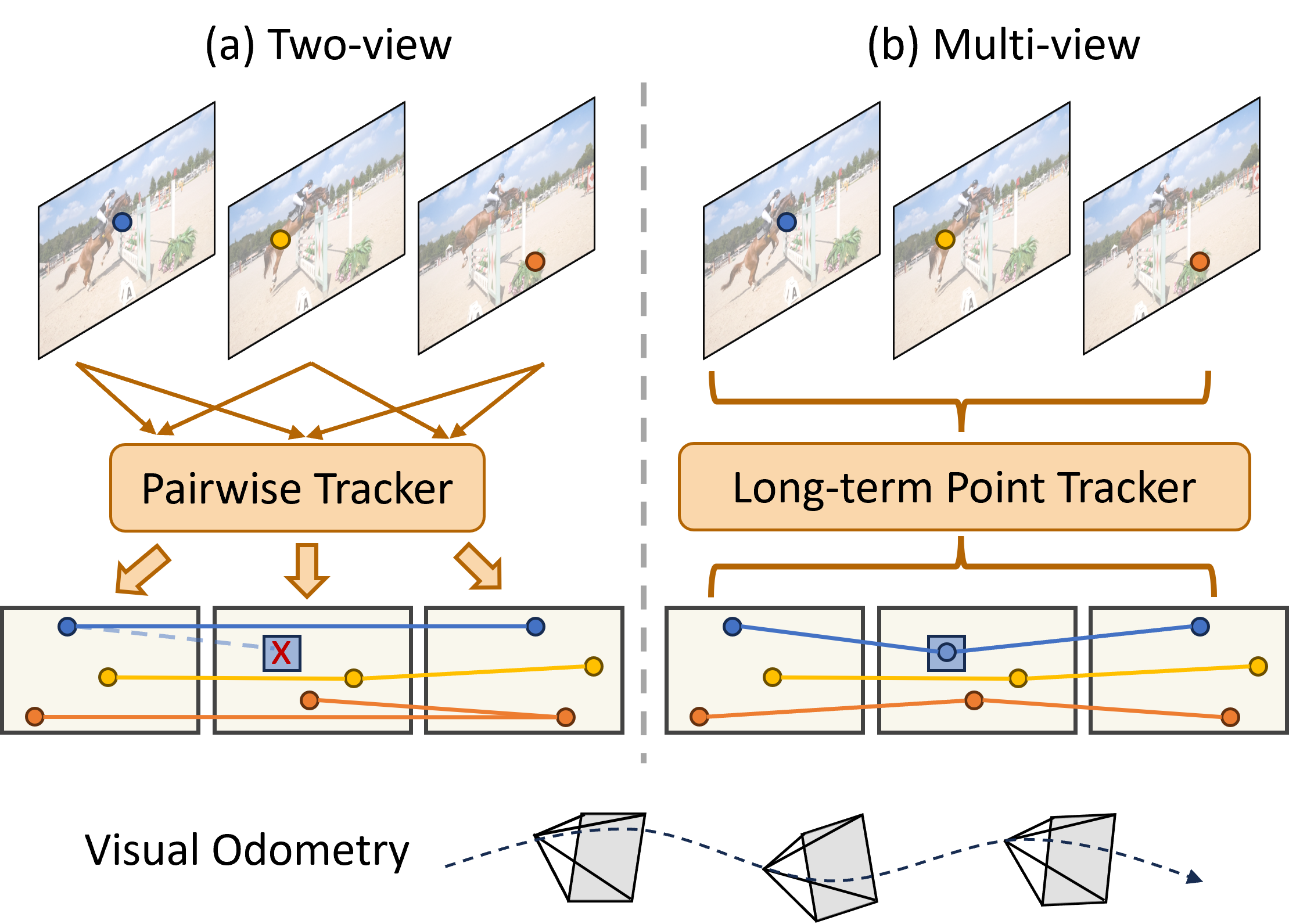
LEAP-VO: Long-term Effective Any Point Tracking for Visual Odometry , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024. ([project page])


