
Johannes Michael Meier
PhD StudentTechnical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail: J.Meier@tum.de
Brief Bio
Ph.D. Student in Computer Vision at TUM (headed by Prof. Dr. Daniel Cremers). My PhD is done in collaboration with DeepScenario. In 2025 I did a 4-month research visit at ETH Zurich (group of Marc Pollefeys).
My research focuses on monocular 3D object detection, tracking, semi-supervised learning, domain adaptation, and few-shot learning.
I hold an M.Sc. in Computer Science from the University of Tübingen. During my studies, I worked at the Max Planck Institute for Intelligent Systems (MPI-IS) Tübingen. My Master's Thesis (in collaboration with Bosch Research) was supervised by Prof. Dr. Andreas Geiger.
Publications
Export as PDF, XML, TEX or BIB
Conference and Workshop Papers
2026
[] 
IDEAL-M3D: Instance Diversity-Enriched Active Learning for Monocular 3D Detection , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2026.
[] 
GrounDiff: Diffusion-Based Ground Surface Generation from Digital Surface Models , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2026. ([project page])
2025
[] 
LeAD-M3D: Leveraging Asymmetric Distillation for Real-time Monocular 3D Detection , In arXiv, 2025. ([project page])
[] 
OrthoLoC: UAV 6-DoF Localization and Calibration Using Orthographic Geodata , In 39th Conference on Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2025. ([project page])
Oral Presentation [] 
CoProU-VO: Combining Projected Uncertainty for End-to-End Unsupervised Monocular Visual Odometry , In 47th German Conference on Pattern Recognition (GCPR), 2025. ([project page])
Oral Presentation - Best Paper Award [] 
Shape Your Ground: Refining Road Surfaces Beyond Planar Representations , In IEEE Intelligent Vehicles Symposium, 2025. ([project page])
[] 
Highly Accurate and Diverse Traffic Data: The DeepScenario Open 3D Dataset , In IEEE Intelligent Vehicles Symposium, 2025. ([project page])
[] 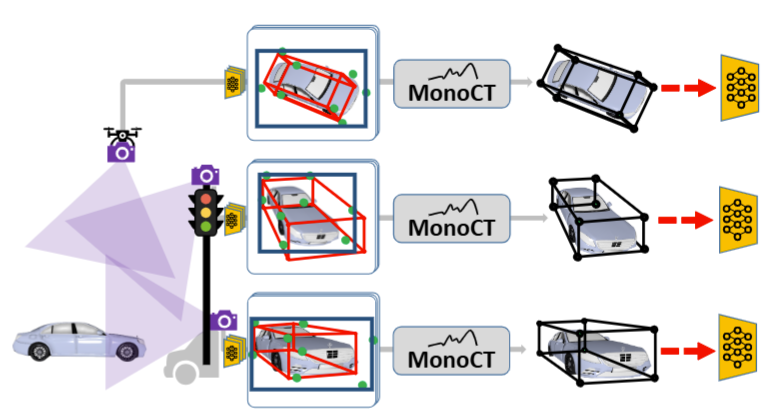
MonoCT: Overcoming Monocular 3D Detection Domain Shift with Consistent Teacher Models , In International Conference on Robotics and Automation (ICRA), 2025.
Oral Presentation
2024
[] 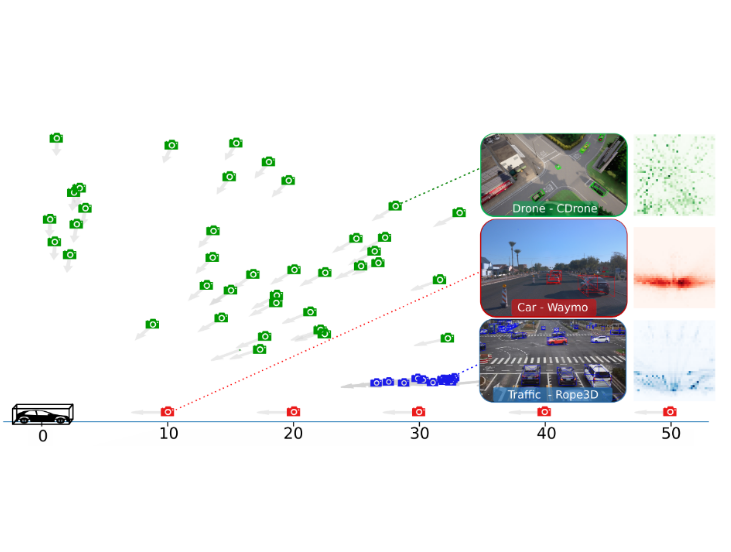
CARLA Drone: Monocular 3D Object Detection from a Different Perspective , In 46th German Conference on Pattern Recognition (GCPR), 2024. ([project page])
Oral Presentation
2023
[] 
NIFF: Alleviating Forgetting in Generalized Few-Shot Object Detection via Neural Instance Feature Forging , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023.
2021
[] 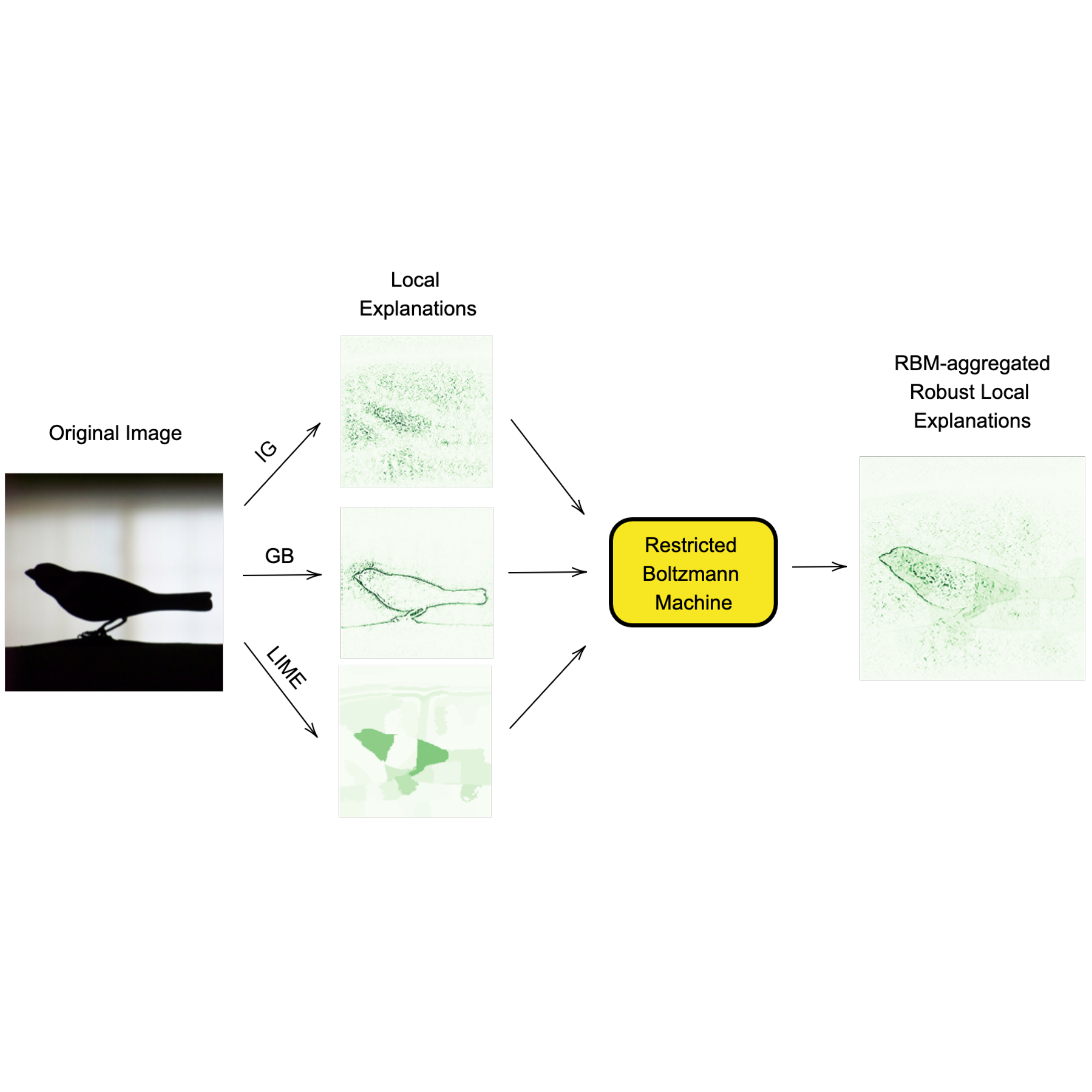
A Robust Unsupervised Ensemble of Feature-Based Explanations using Restricted Boltzmann Machines , In Neural Information Processing Systems Conference - NeurIPS 2021: eXplainable AI approaches for debugging and diagnosis workshop, 2021.


