
Oussema Dhaouadi
PhD StudentTechnical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail: oussema.dhaouadi@tum.de
Brief Bio
I am a Ph.D. student at TUM's Computer Vision Group, headed by Research Interests. I am currently a visiting researcher at ETH Zürich in the Computer Vision and Geometry Group led by Prof. Marc Pollefeys. My research focuses on large-scale 3D reconstruction, localization, and geospatial AI.
Before joining the Ph.D. program, I worked as a Machine Learning Engineer at Knowlix GmbH. There, I researched OCR modeling and LLMs such as GPTs and Llama. I also designed data and machine learning pipelines and applied machine learning techniques to solve real-world problems.
I completed my Master's studies in Electrical Engineering and Information Technology at TUM. My focus was on Automation, Robotics, and AI. I spent a semester abroad at NTU Singapore, where I studied Deep Learning for Natural Language Processing and Genetic Algorithms.
For my Master's thesis, I worked at BMW Group AG on AR glasses and head 6DoF pose estimation based on 3D multi-view geometry reconstruction and deep learning. My research involved implementing a system that could estimate the head and AR glasses pose with high accuracy (Project). It resulted in a publication titled "Comparing Head and AR Glasses Pose Estimation."
I also completed my Bachelor of Science in Electrical Engineering and Information Technology at TUM, with a focus on Signal Processing. During my Bachelor's thesis, I worked on generative modeling using Capsule Generative Adversarial Networks at the Chair of Robotics, Artificial Intelligence, and Real-time Systems at TUM.
Research Interests
- Large-Scale Scene Reconstruction
- Visual Odometry
- Simultaneous Localization and Mapping
- Camera Relocalization
- Geospatial AI: Remote Sensing, Photogrammetry, Terrain Modeling, GIS
Student Projects
Update 01.2026 All student project positions are filled.
Successfully Finished Student Projects:
- Master Thesis - Benedict Ruppel: Feed-Forward Monocular SLAM Using Vision Transformers for Autonomous Driving
- Guided Research - Jingchao Xie: Uncertainty-VO: Improving End-to-End Self-Supervised Monocular Visual Odometry with Robust Projected Uncertainty
- Master Thesis - Robin Hanik: 6 DoF UAV Localization Using DOPs and DSMs under Varied Environmental Conditions
- Bachelor Thesis - Mohamed Skandrani: Exploring Gaussian Splatting for Enhanced 3D Reconstruction from Drone Imagery
- Master Thesis - Yue Tan: 3D Reconstruction of Street View Scenarios Using a Single Monocular Camera
Publications
Export as PDF, XML, TEX or BIB
Conference and Workshop Papers
2026
[] 
IDEAL-M3D: Instance Diversity-Enriched Active Learning for Monocular 3D Detection , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2026.
[] 
GrounDiff: Diffusion-Based Ground Surface Generation from Digital Surface Models , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2026. ([project page])
2025
[] 
LeAD-M3D: Leveraging Asymmetric Distillation for Real-time Monocular 3D Detection , In arXiv, 2025. ([project page])
[] 
OrthoLoC: UAV 6-DoF Localization and Calibration Using Orthographic Geodata , In 39th Conference on Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2025. ([project page])
Oral Presentation [] 
CoProU-VO: Combining Projected Uncertainty for End-to-End Unsupervised Monocular Visual Odometry , In 47th German Conference on Pattern Recognition (GCPR), 2025. ([project page])
Oral Presentation - Best Paper Award [] 
Shape Your Ground: Refining Road Surfaces Beyond Planar Representations , In IEEE Intelligent Vehicles Symposium, 2025. ([project page])
[] 
Highly Accurate and Diverse Traffic Data: The DeepScenario Open 3D Dataset , In IEEE Intelligent Vehicles Symposium, 2025. ([project page])
[] 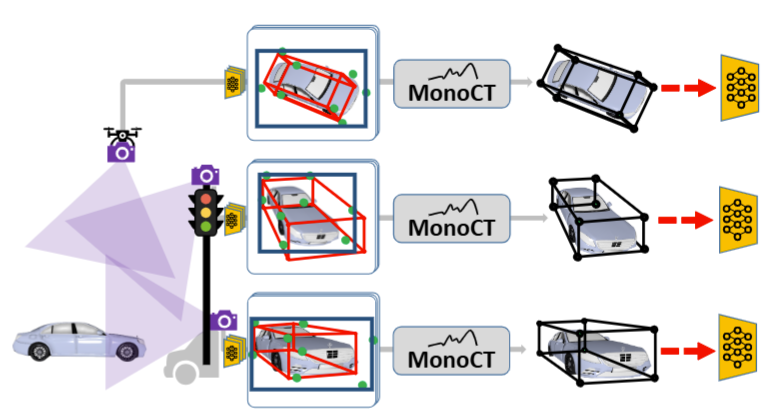
MonoCT: Overcoming Monocular 3D Detection Domain Shift with Consistent Teacher Models , In International Conference on Robotics and Automation (ICRA), 2025.
Oral Presentation [] 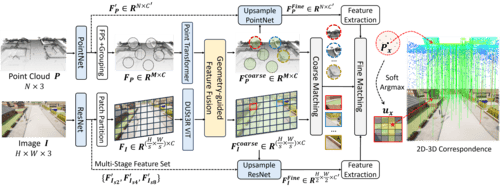
TrafficLoc: Localizing Traffic Surveillance Cameras in 3D Scenes , In IEEE International Conference on Computer Vision (ICCV), 2025. ([project page])
2024
[] 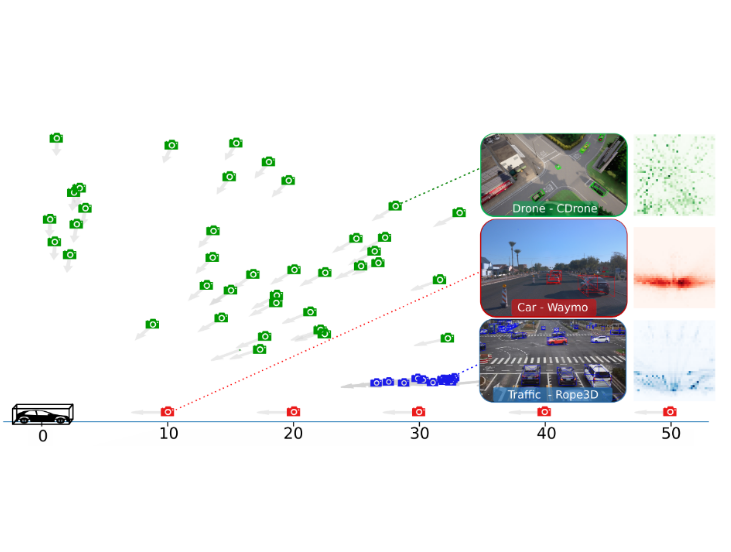
CARLA Drone: Monocular 3D Object Detection from a Different Perspective , In 46th German Conference on Pattern Recognition (GCPR), 2024. ([project page])
Oral Presentation
2021
[] 
Comparing Head and AR Glasses Pose Estimation , In 2021 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), volume , 2021.


