Ganlin Zhang
PhD StudentTechnical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Tel: +49-89-289-17782
Fax: +49-89-289-17757
Office: 02.09.055
Mail: ganlin.zhang@tum.de
Personal homepage: https://ganlinzhang.xyz
Research Interests
3D Vision, Visual SLAM, Structure from Motion, 3D Reconstrution.
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2025
[] 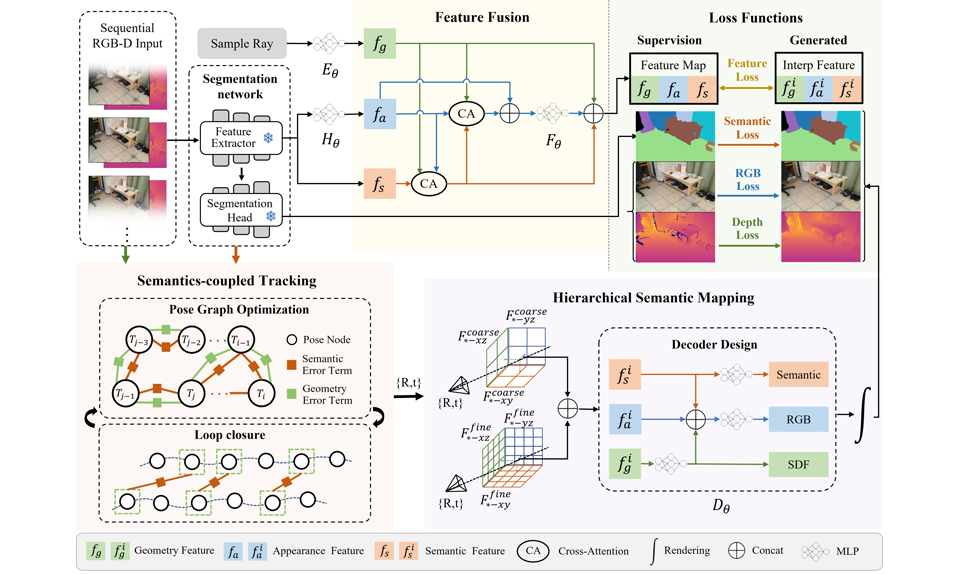
SNI-SLAM++: Tightly-coupled Semantic Neural Implicit SLAM , In IEEE transactions on pattern analysis and machine intelligence, 2025. ([project page])
Preprints
2026
[] 
Flow4R: Unifying 4D Reconstruction and Tracking with Scene Flow , In arXiv preprint arXiv:2602.14021, 2026. ([page])
2024
[] 
GlORIE-SLAM: Globally Optimized Rgb-only Implicit Encoding Point Cloud SLAM , In arXiv preprint arXiv:2403.19549, 2024. ([project],[code])
Conference and Workshop Papers
2026
[] 
NOVA3R: Non-pixel-aligned Visual Transformer for Amodal 3D Reconstruction , In The Fourteenth International Conference on Learning Representations (ICLR), 2026. ([Project Page])
[] 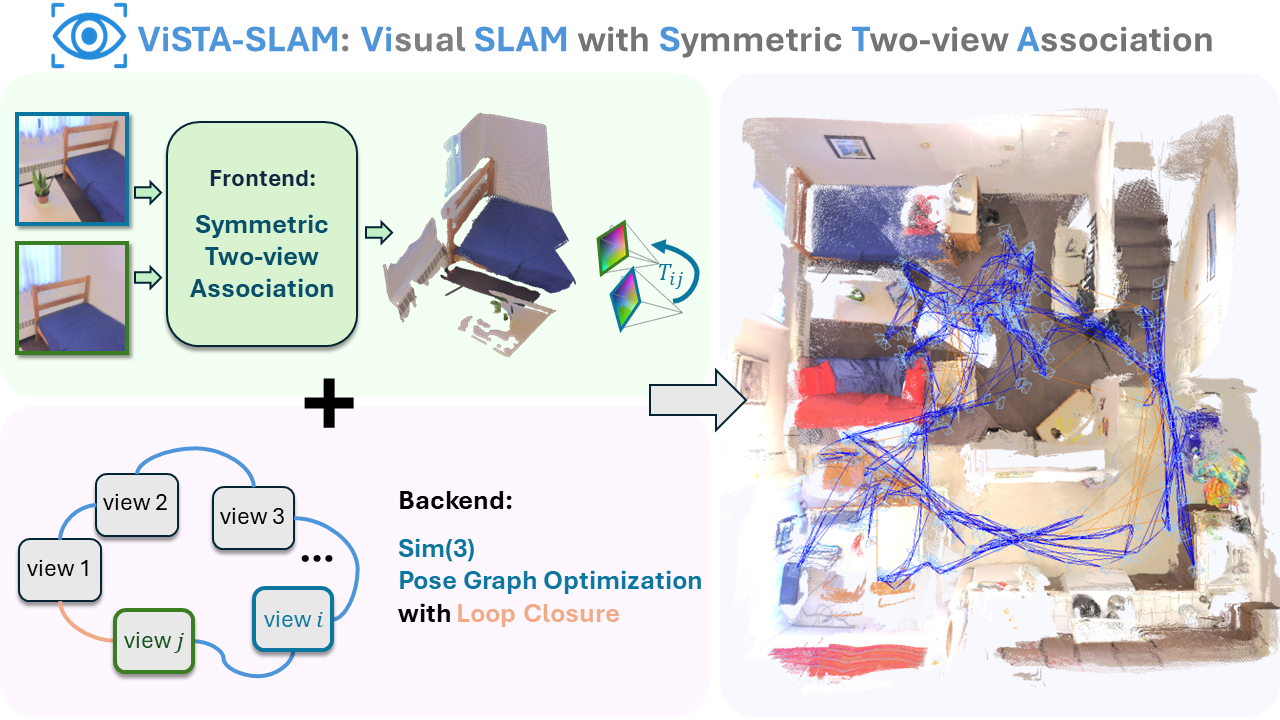
ViSTA-SLAM: Visual SLAM with Symmetric Two-view Association , In 3DV, 2026. ([project page] [code])
2025
[] 
Back on Track: Bundle Adjustment for Dynamic Scene Reconstruction , In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2025. ([project page])
Best Paper Candidate [] 
Splat-slam: Globally optimized rgb-only slam with 3d gaussians , In Proceedings of the Computer Vision and Pattern Recognition Conference Workshops, 2025. ([code])
2023
[] 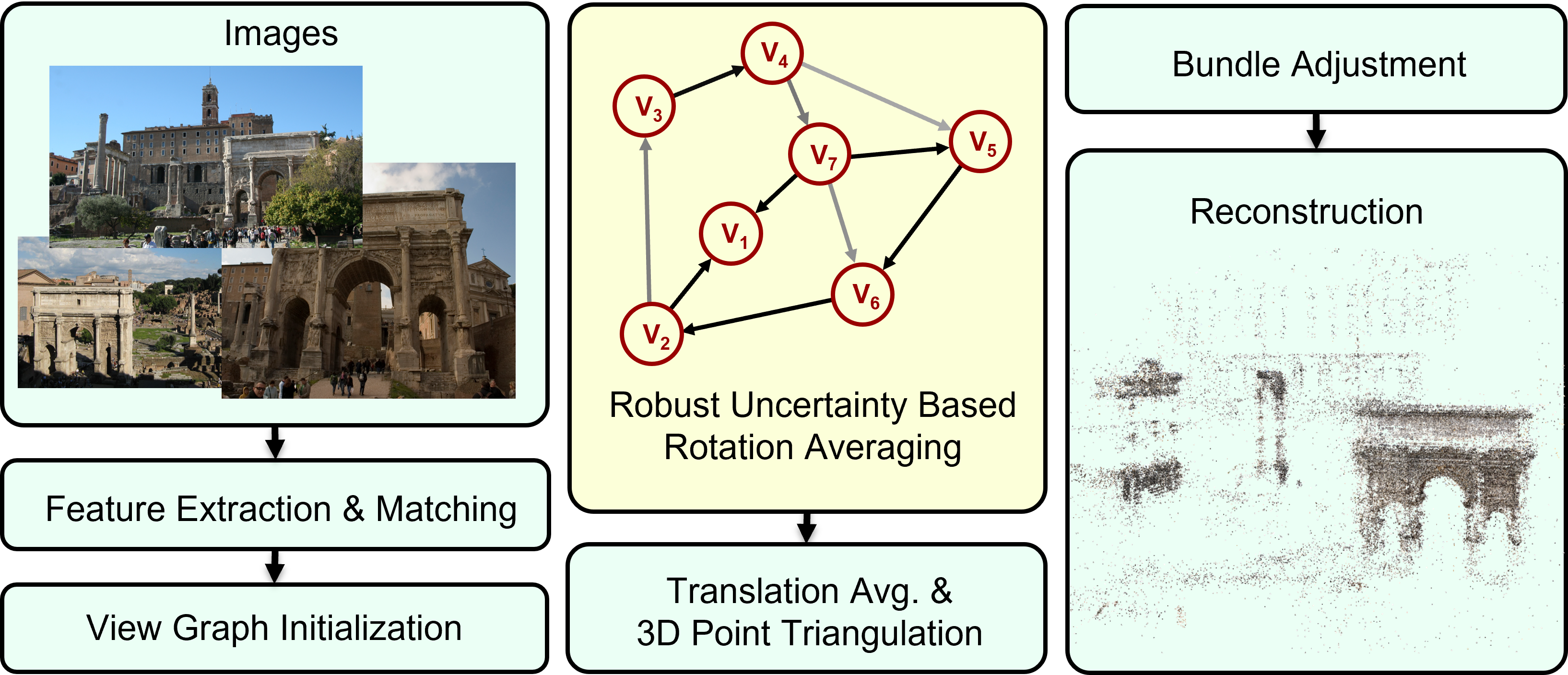
Revisiting Rotation Averaging: Uncertainties and Robust Losses , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023. ([code])


