
Linus Härenstam-Nielsen
PhD StudentTechnical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Tel: +49-89-289-17752
Fax: +49-89-289-17757
Office: 02.09.058
Mail: linus.nielsen@tum.de
For recent updates, visit my Personal Website
Research Interests
- 3D reconstruction and pose estimation from multiple sensors
- Optimization methods for computer vision and deep learning
If you are a student with a strong background in programming and/or math and would like to do a master's thesis, feel free to reach out!
About
I received my M.Sc. in Systems control and Robotics from KTH, Royal Institute of Technology (Stockholm, Sweden) in 2018. After that, I spent roughly 3 years as a computer vision engineer at Univrses working on visual odometry and deep learning for autonomous driving. Since September 2021, I have been a Ph.D. student in the Computer Vision Group. I spent the first year of the PhD at Artisense.
Publications
Export as PDF, XML, TEX or BIB
Preprints
2026
[] 
Generative Shape Reconstruction with Geometry-Guided Langevin Dynamics , In arXiv preprint arXiv:2603.27016, 2026.
Conference and Workshop Papers
2025
[] 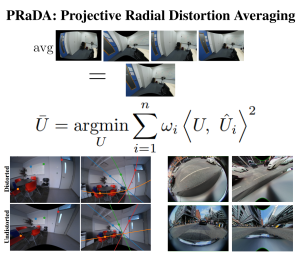
PRaDA: Projective Radial Distortion Averaging , In Proceedings of the Computer Vision and Pattern Recognition Conference(CVPR), 2025.
2024
[] 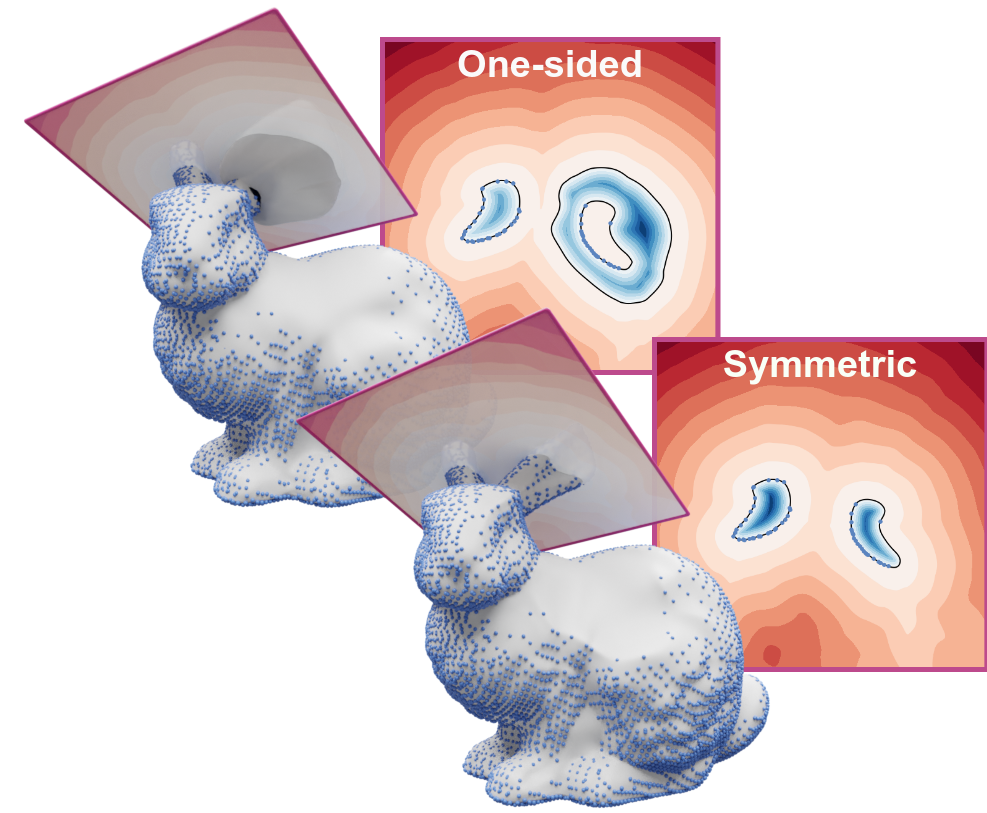
DiffCD: A Symmetric Differentiable Chamfer Distance for Neural Implicit Surface Fitting , In European Conference on Computer Vision (ECCV), 2024.
2023
[] 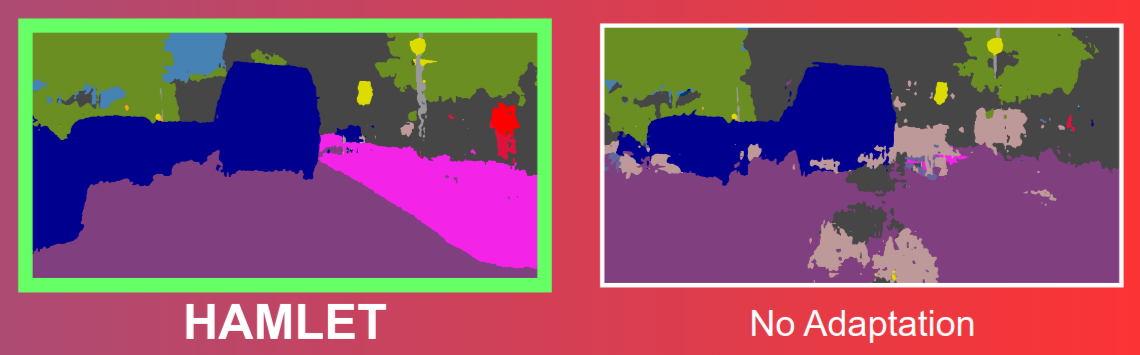
To adapt or not to adapt? Real-time adaptation for semantic segmentation , In Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023.
[] 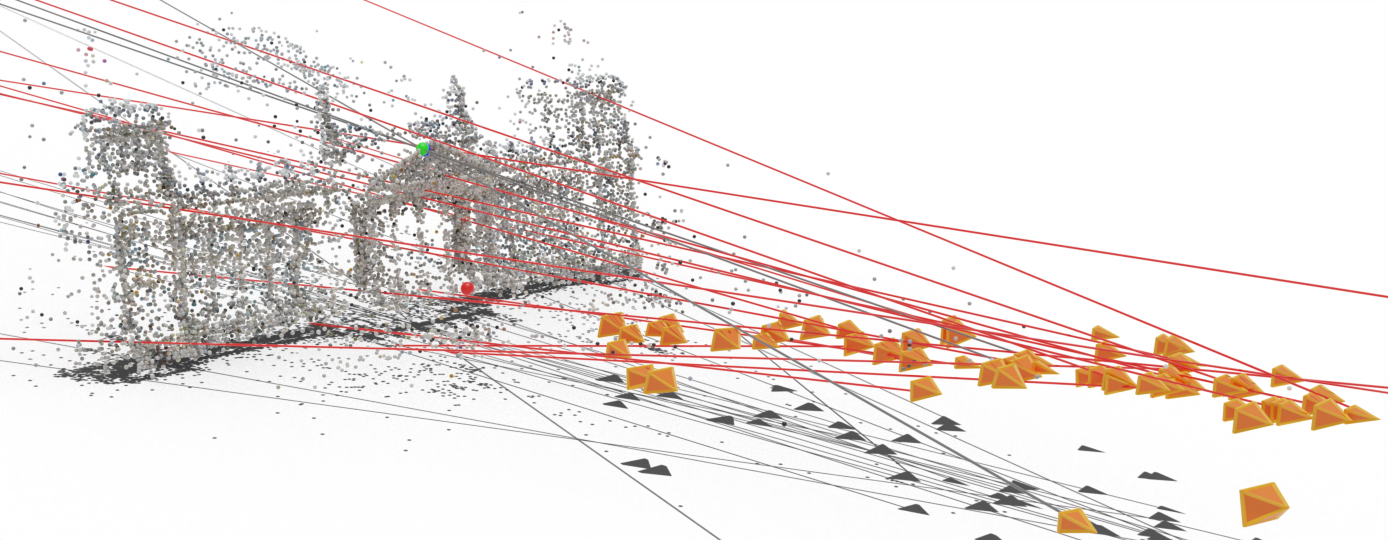
Semidefinite Relaxations for Robust Multiview Triangulation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023.
2020
[] 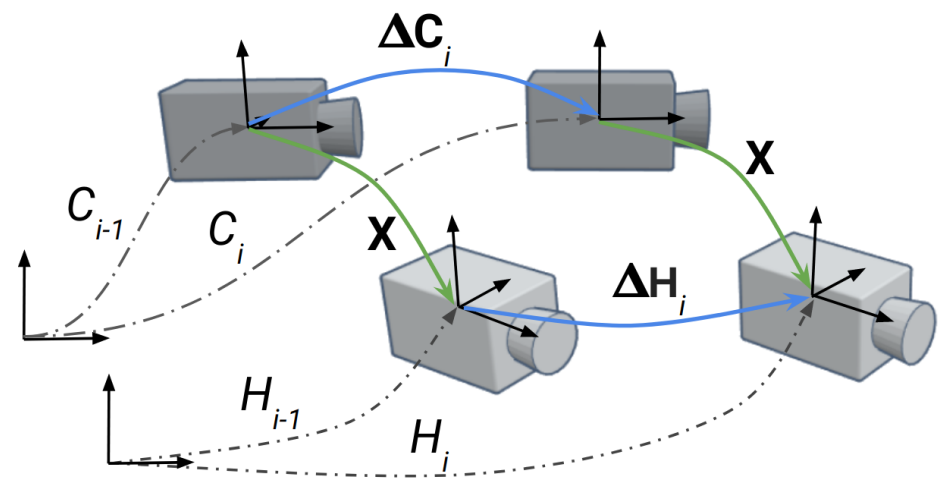
Optimal least-squares solution to the hand-eye calibration problem , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2020.


