
Mariia Gladkova
PhD Student
Technical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Tel: +49-89-289-17763
Fax: +49-89-289-17757
Office: 02.09.038
Mail: mariia.gladkova@tum.de
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2024
[] 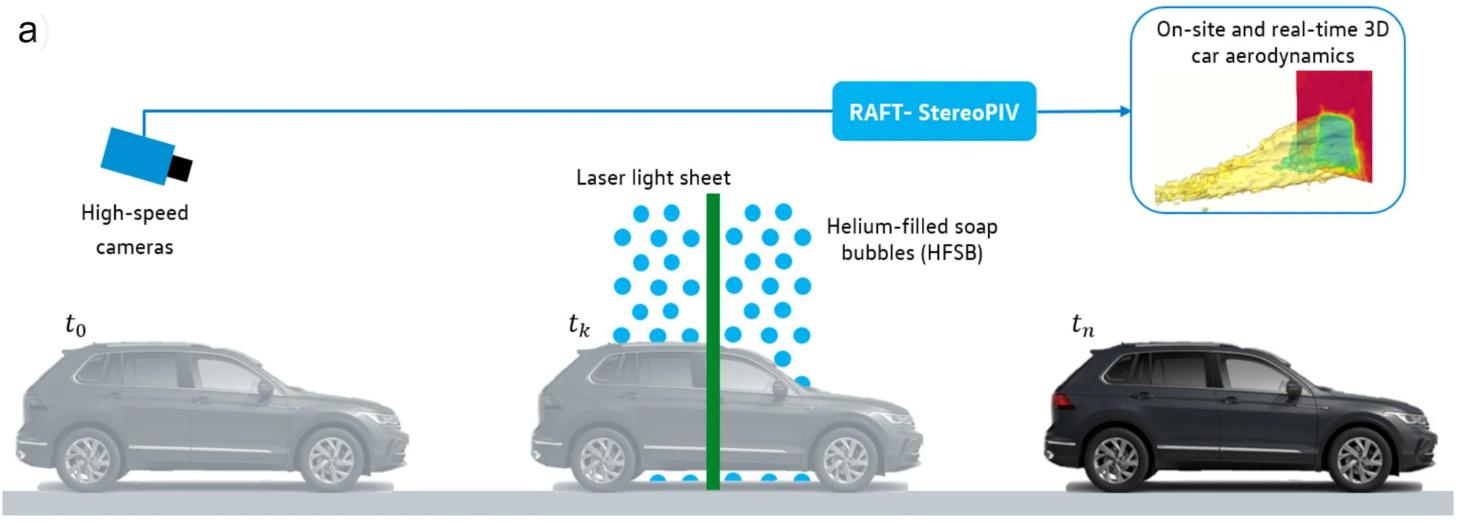
On-site aerodynamics using stereoscopic PIV and deep optical flow learning , In Experiments in Fluids, Springer Nature, volume 65, 2024. ([paper])
2023
[] 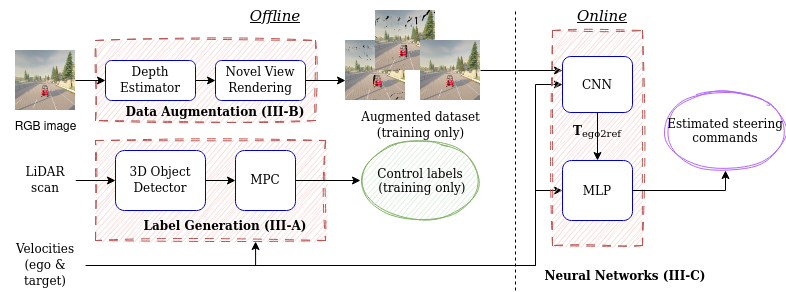
Robust Autonomous Vehicle Pursuit without Expert Steering Labels , In IEEE Robotics and Automation Letters (RA-L), volume 8, 2023. ([arXiv][code])
Preprints
2025
[] 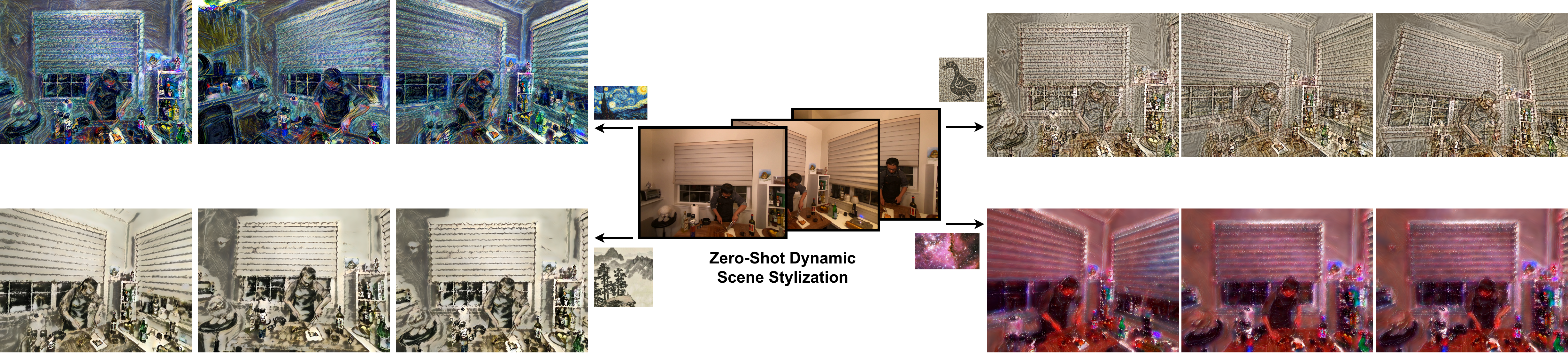
ZDySS – Zero-Shot Dynamic Scene Stylization using Gaussian Splatting , In arXiv preprint arXiv:2501.03875, 2025.
Conference and Workshop Papers
2026
[] 
TRASE: Tracking-free 4D Segmentation and Editing , In 3DV, 2026. ([webpage])
2025
[] 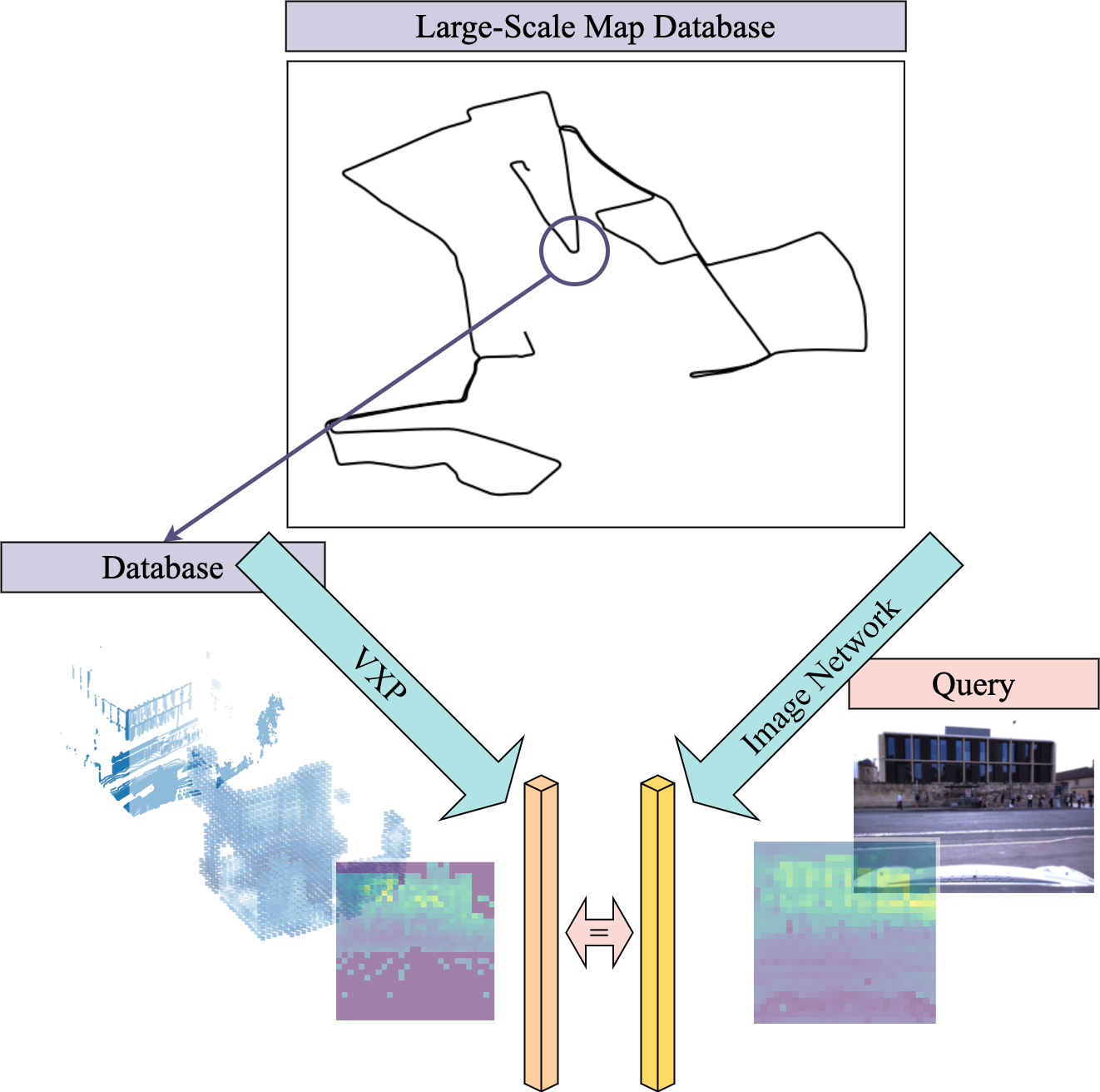
VXP: Voxel-Cross-Pixel Large-scale Image-LiDAR Place Recognition , In 3DV, 2025. ([webpage])
2024
[] 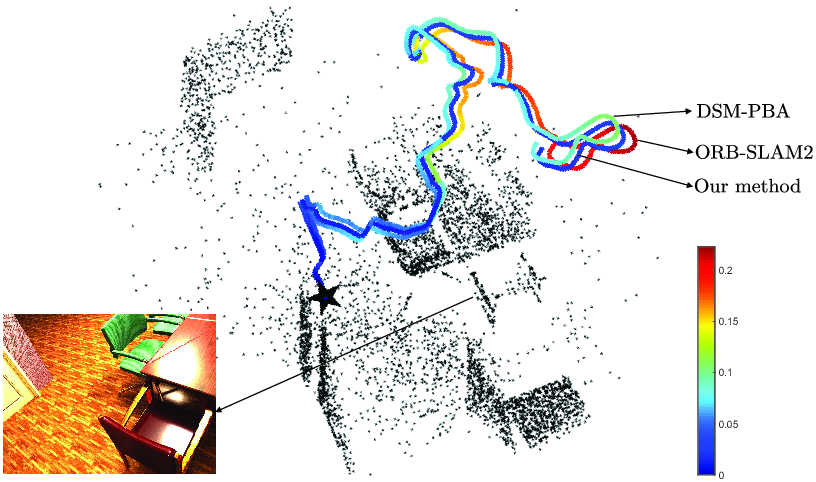
Physically-Based Photometric Bundle Adjustment in Non-Lambertian Environments , In International Conference on Intelligent Robots and Systems (IROS), 2024.
[] 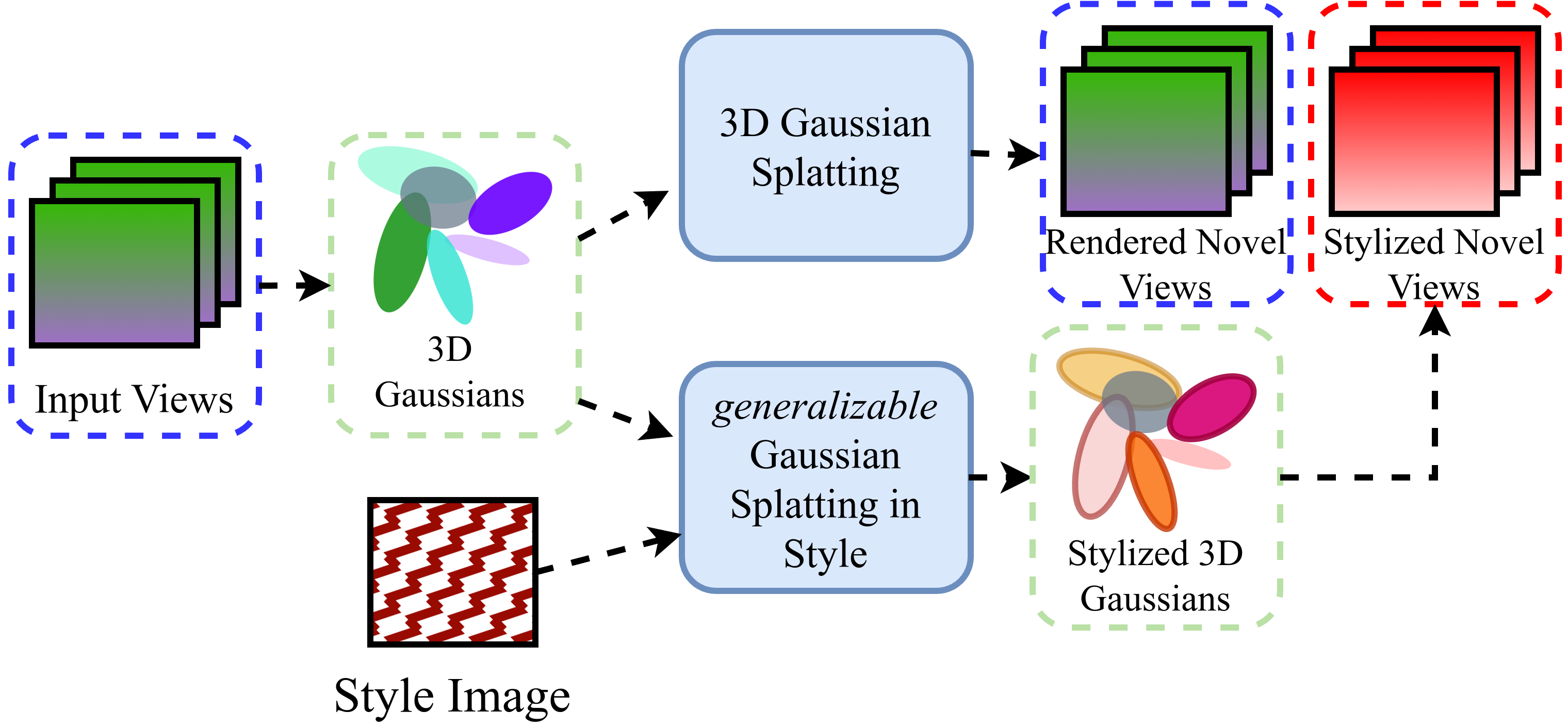
Gaussian Splatting in Style , In German Conference on Pattern Recognition (GCPR), 2024.
2023
[] 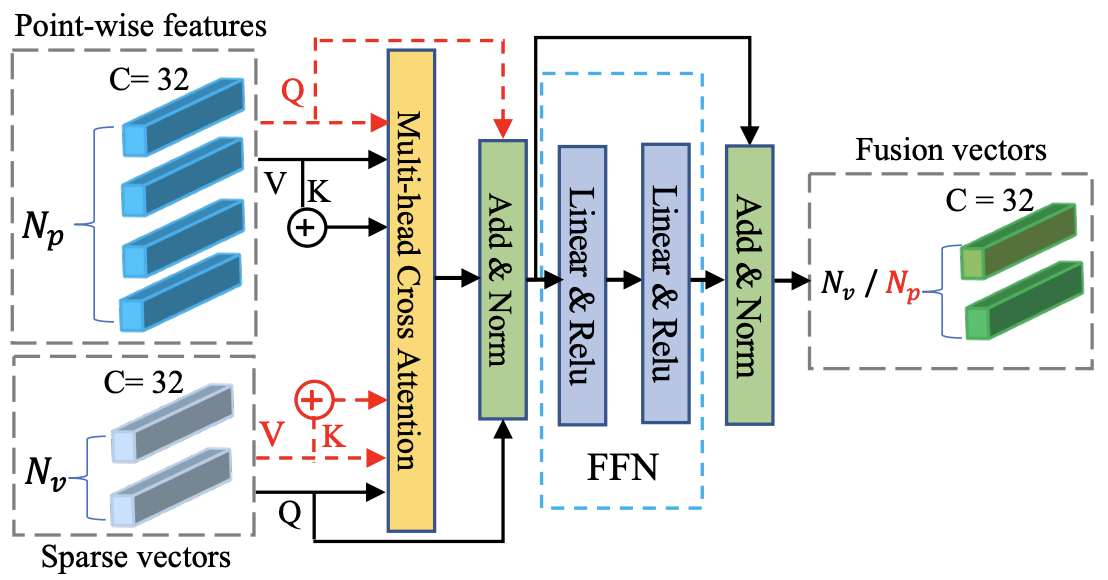
CASSPR: Cross Attention Single Scan Place Recognition , In IEEE International Conference on Computer Vision (ICCV), 2023. ([code])
2022
[] ![]()
DirectTracker: 3D Multi-Object Tracking Using Direct Image Alignment and Photometric Bundle Adjustment , In International Conference on Intelligent Robots and Systems (IROS), 2022. ([project page])
2021
[] 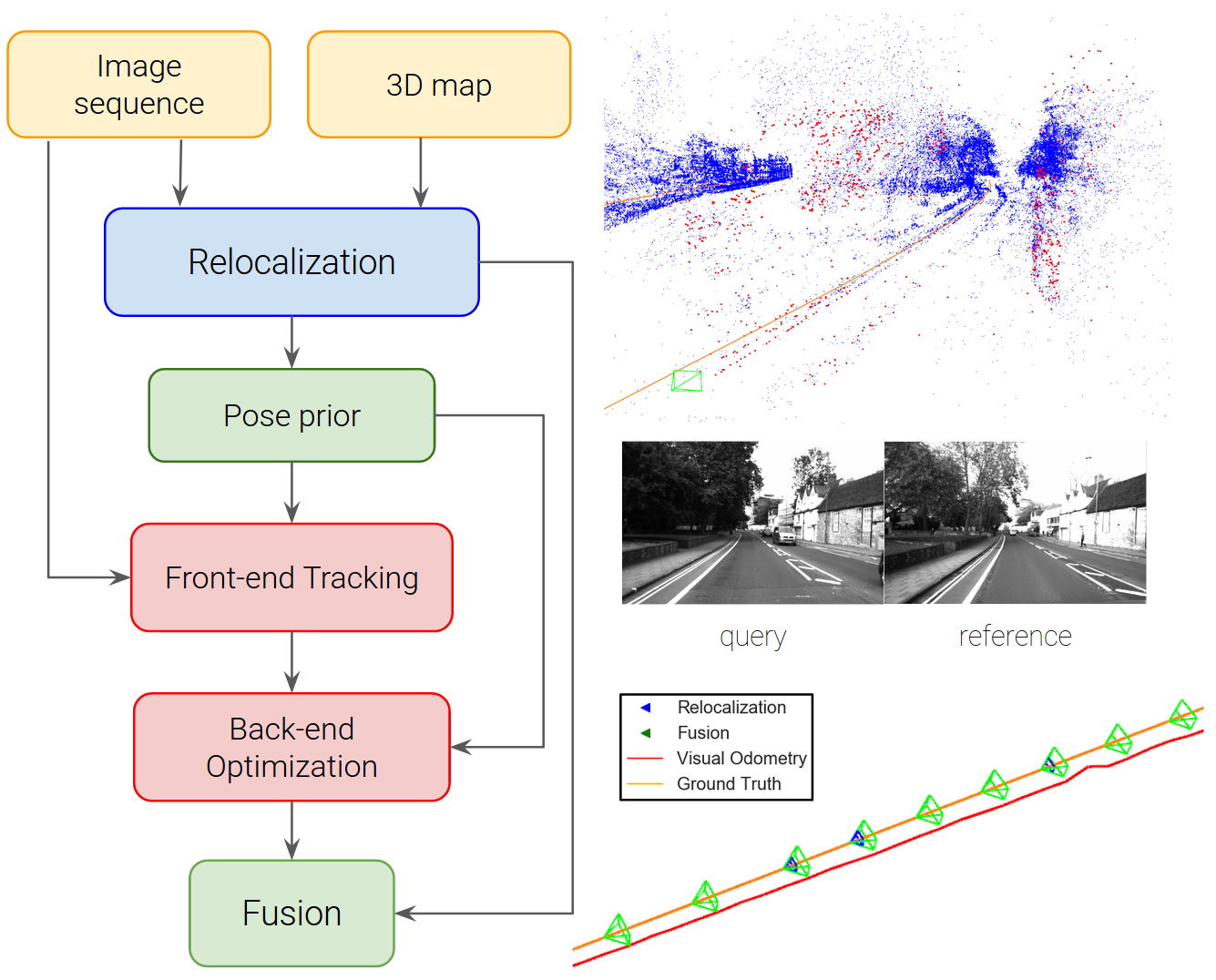
Tight Integration of Feature-based Relocalization in Monocular Direct Visual Odometry , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2021. ([project page])
Courses
- WS24: Master Seminar Recent Advances in 4D Computer Vision together with Cecilia Curreli.
- SS24: Master Seminar HuMANS: 3D Human Motion Analysis together with Cecilia Curreli.
- SS23: Practical course Learning For Self-Driving Cars and Intelligent Systems together with Qadeer Khan.
- WS22: Practical course Learning For Self-Driving Cars and Intelligent Systems together with Qadeer Khan.
- SS22: Practical course Learning For Self-Driving Cars and Intelligent Systems together with Qadeer Khan.
- WS21: Practical course Learning For Self-Driving Cars and Intelligent Systems together with Qadeer Khan.
Completed Student Projects
- Yun-Jin Li "SADG: Segment Any Dynamic Gaussian Without Object Trackers", Master's thesis, September 2024 paper
- Wenliang Peng "MonoRec++: Scene Flow-guided Accurate Dense Reconstruction for 3D Object Detection", Master thesis, April 2023 report
- Yun-Jin Li "DeepI2PLoc: Image-to-Pointcloud Large-scale Localization", Guided Research, November 2023 paper


