
Qing Cheng
PhD StudentTechnical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail: qing.cheng@tum.de
About
I received my M.Sc. in Information Technology from the University of Stuttgart and then worked for 4 years as a Computer Vision & Artificial Intelligence engineer in Artisense co-founded by Prof. Dr. Daniel Cremers. Since 2023, I'm a Ph.D. student in the Computer Vision Group, headed by Prof. Dr. Daniel Cremers at TUM.
My research interests lie in vision-based 3D reconstruction, 2D/3D scene understanding, and 3D asset/scene generation.
I am looking for collaborators and motivated students for research projects. Feel free to get in touch with me via email.
Open Research Projects
1. Extension based HI-SLAM2 (visual slam with 3DGS mapping accepted at TRO 2025)
- Ref. to HI-SLAM2
- Dynamic Scene
- Large-Scale Scene
- 4D Guassian Splating
- etc.
2. Feed-Forward 3D Reconstruction
- Ref. to VGGT, MapAnything
3. 3D object/shape generation/completion
- We've created a shape completion dataset. The main idea is to utilize the 3D generation technique to complete the partial shape either from partial SDF/point cloud/depth map.
4. Embedding Open vocabulary understanding into dynamic scenes in 3D neural reconstruction
Currently, research works like LERF, OpenNERF have successfully embedded semantic features from foundation vision models (CLIP, DINOv2) into the volumetric neural representations. However, applying these techniques to dynamic scenes remains an open research challenge. In this master’s thesis, you will work on reconstructing dynamic scenes using neural radiance fields from temporal image sequences or videos. The goal is to enhance these reconstructions with the ability to comprehend open vocabulary semantics.
Preferred Requirements:
- Strong motivation in research with a focus on achieving publication.
- Strong background in 3D computer vision
- Proficiency in Python and PyTorch.
- The projects usualy last 6 months or so for a guide research or thesis project.
If you are interested, please contact me via email with your CV/transcript/motivation attached.
Complete Student Projects
- When and Where do Events Switch in Multi-Event Video Generation? [LongVid-Foundations@ICCV2025]
- MambaPanoptic: A Vision Mamba-based Structured State Space Framework for Panoptic Segmentation [ISPRS 2026]
- PRISM: Probabilistic Representation for Integrated Shape Modeling and Generation [ArXiv]
- R4D: Rigidity-aware 4D Guassian REconstruction from Causal Videos
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2025
[] 
VoxNeRF: Bridging Voxel Representation and Neural Radiance Fields for Enhanced Indoor View Synthesis , In IEEE Robotics and Automation Letters (RA-L), 2025.
[] 
HI-SLAM2: Geometry-Aware Gaussian SLAM for Fast Monocular Scene Reconstruction , In IEEE Transactions on Robotics, 2025. ( [project] [code])
2024
[] 
HI-SLAM: Monocular Real-Time Dense Mapping With Hybrid Implicit Fields , In IEEE Robotics and Automation Letters (RAL) & Int. Conference on Intelligent Robots and Systems (IROS), volume 9, 2024. ([project] )
Oral Presentation
Preprints
2025
[] 
GeoSceneGraph: Geometric Scene Graph Diffusion Model for Text-guided 3D Indoor Scene Synthesis , In arXiv preprint arXiv:2511.14884, 2025.
[] 
PRISM: Probabilistic Representation for Integrated Shape Modeling and Generation , In arXiv preprint arXiv:2411.17982, 2025.
Conference and Workshop Papers
2025
[] 
When and Where do Events Switch in Multi-Event Video Generation? , In Proceedings of the IEEE/CVF International Conference on Computer Vision Workshops (LongVid-Foundations), 2025.
[] 
TurnBack: A Geospatial Route Cognition Benchmark for Large Language Models through Reverse Route , In Empirical Methods in Natural Language Processing (EMNLP), 2025. ([code])
2022
[] 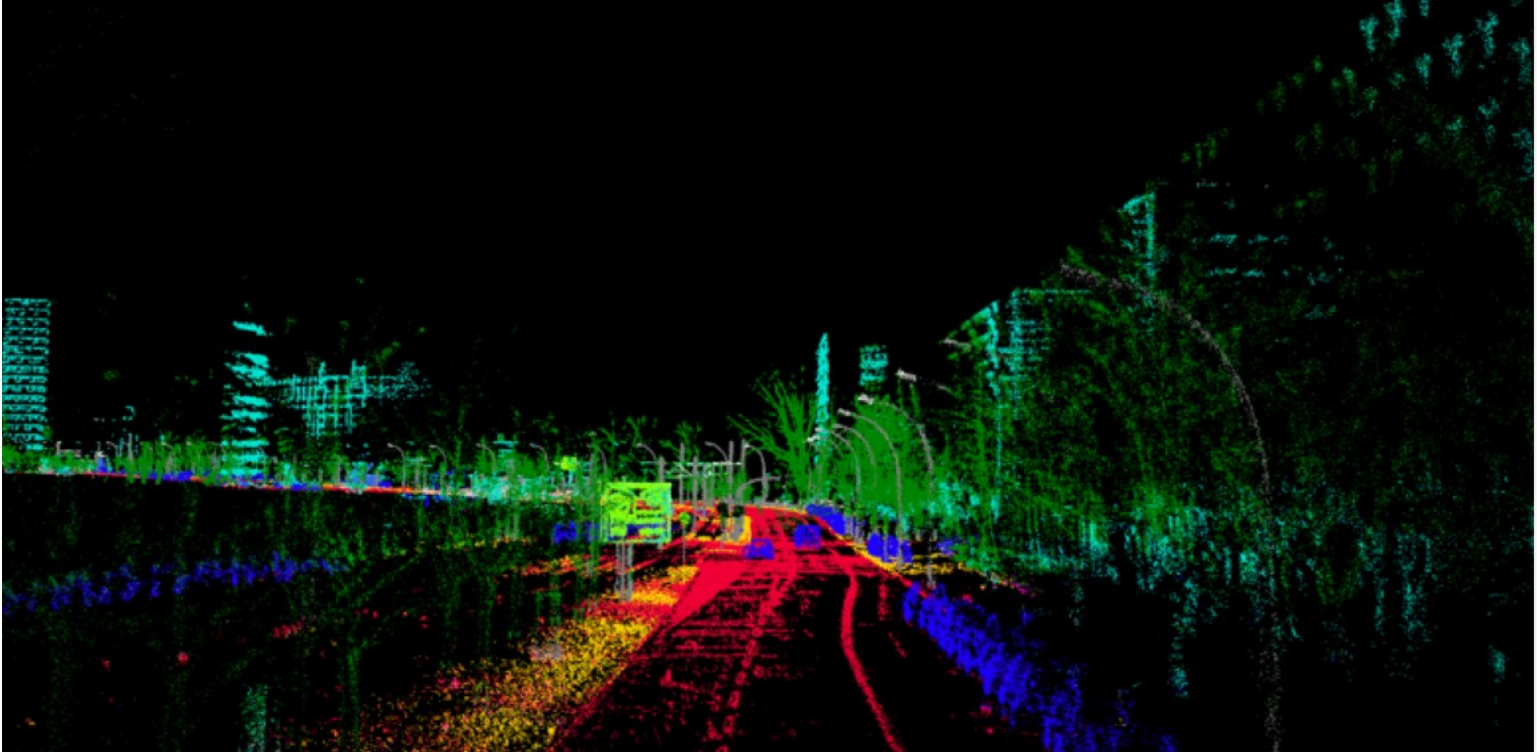
Vision-Based Large-scale 3D Semantic Mapping for Autonomous Driving Applications , In International Conference on Robotics and Automation (ICRA), 2022.
2020
[] 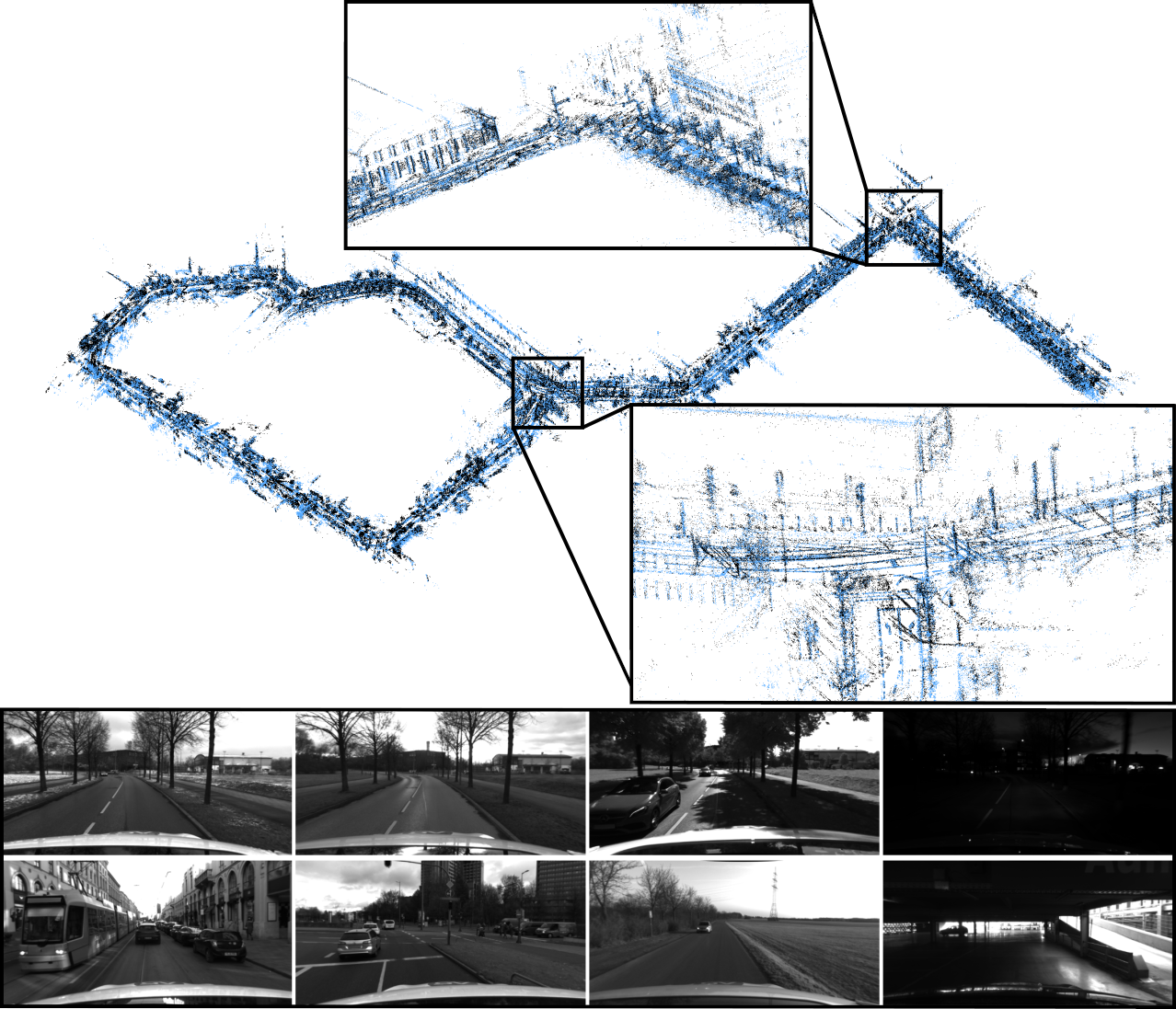
4Seasons: A Cross-Season Dataset for Multi-Weather SLAM in Autonomous Driving , In Proceedings of the German Conference on Pattern Recognition (GCPR), 2020. ([arXiv][video])


