This is an old revision of the document!

PhD student
Technical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail: Lukas.Koestler@tum.de
Please also see my personal webpage and my twitter account.
Student Projects
Due to an upcoming internship I am currently not looking for students. I will be back by the beginning of August 2023 and would be happy to discuss projects that start after that.
I am looking for motivated and talented students to work on topics in 3D Deep Learning, 3D reconstruction, and dense monocular SLAM. Please contact me directly by mail and highlight your relevant academic experience and programming skills. Additionally, please include a CV and a recent transcript.
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2023
[] 
E-nerf: Neural radiance fields from a moving event camera , In IEEE Robotics and Automation Letters, IEEE, volume 8, 2023. ([project page])
Conference and Workshop Papers
2024
[] 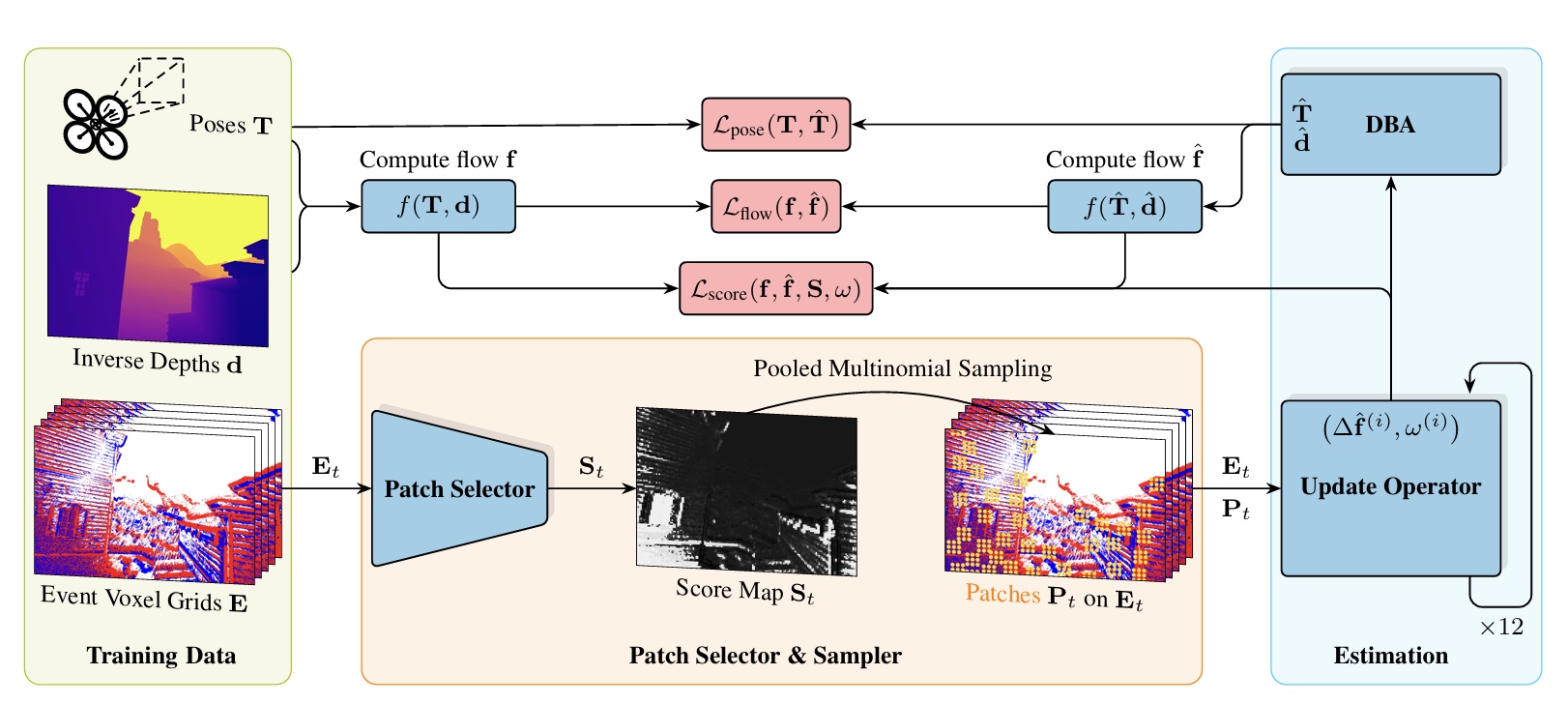
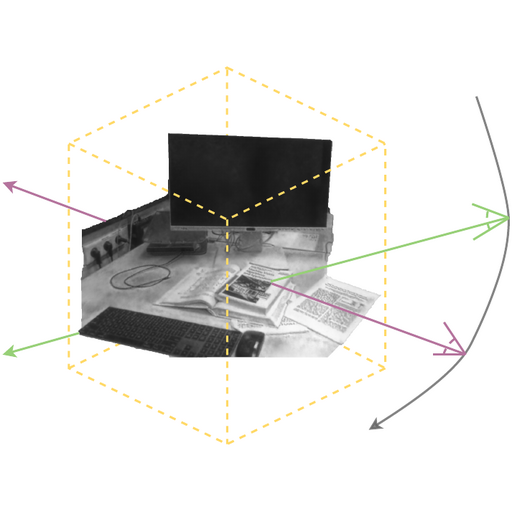
Deep event visual odometry , In 2024 International conference on 3D vision (3DV), 2024. ([github])
[] 
Masked Event Modeling: Self-Supervised Pretraining for Event Cameras , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2024. ([github])
2023
[] 
Learning Correspondence Uncertainty via Differentiable Nonlinear Least Squares , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023. ([project page])
[] 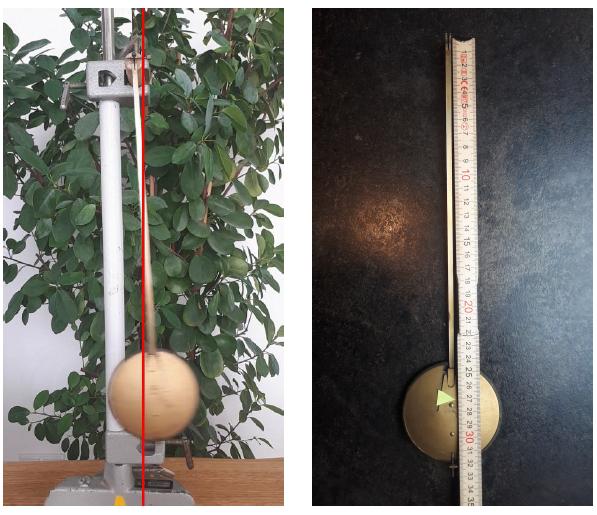
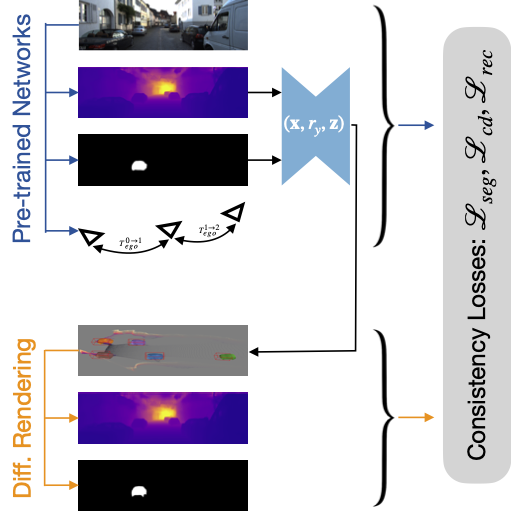
Neural Implicit Representations for Physical Parameter Inference from a Single Video , In IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2023. ([project page])
Spotlight Presentation
2022
[] 
Intrinsic Neural Fields: Learning Functions on Manifolds , In European Conference on Computer Vision (ECCV), 2022. (Code will be released soon.)
[] 
The Probabilistic Normal Epipolar Constraint for Frame-To-Frame Rotation Optimization under Uncertain Feature Positions , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022. ([project page])
2021
[] 
TANDEM: Tracking and Dense Mapping in Real-time using Deep Multi-view Stereo , In Conference on Robot Learning (CoRL), 2021. ([GitHub][video][project page])
3DV'21 Best Demo Award
2020
[] 
Learning Monocular 3D Vehicle Detection without 3D Bounding Box Labels , In Proceedings of the German Conference on Pattern Recognition (GCPR), 2020. ([project page][video])


