
David Schubert
AlumniTechnical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail: david.schubert@in.tum.de
Research
My research focuses on visual odometry and SLAM (see publications). This includes a visual and a visual-inertial odometry system for rolling-shutter cameras, the latter of which can be seen in the video above.
Datasets
Our visual-inertial stereo hardware setup has led to the publication of datasets which are well adopted by the research community. The two cameras of our setup can be operated in different shutter modes, which allows rolling/global-shutter comparisons.
Teaching
- WS16/17 Computer Vision I: Variational Methods (Tutorial)
- WS17/18 Diskrete Strukturen (Tutor groups)
- SS18 Practical Course: GPU Programming in Computer Vision
- WS18/19 Diskrete Strukturen (Tutor groups)
- SS19 Computer Vision II: Multiple View Geometry (Tutorial)
- SS20 Seminar: The Evolution of Motion Estimation and Real-time 3D Reconstruction
- SS20 Practical Course: Vision-based Navigation
- WS20/21 Practical Course: Vision-based Navigation
- SS21 Practical Course: Vision-based Navigation
- SS22 Seminar: Recent Advances in 3D Computer Vision
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2020
[] 
Visual-Inertial Mapping with Non-Linear Factor Recovery , In IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robotics and Automation (ICRA), IEEE, volume 5, 2020. ([arxiv])
Conference and Workshop Papers
2022
[] 
Gradient-SDF: A Semi-Implicit Surface Representation for 3D Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022. ([poster] [presentation] [code])
2021
[] 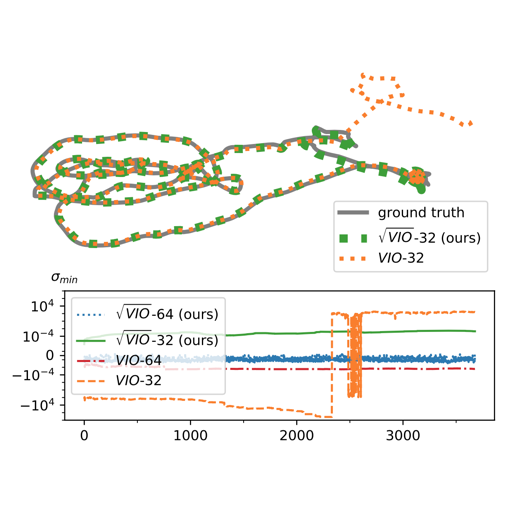
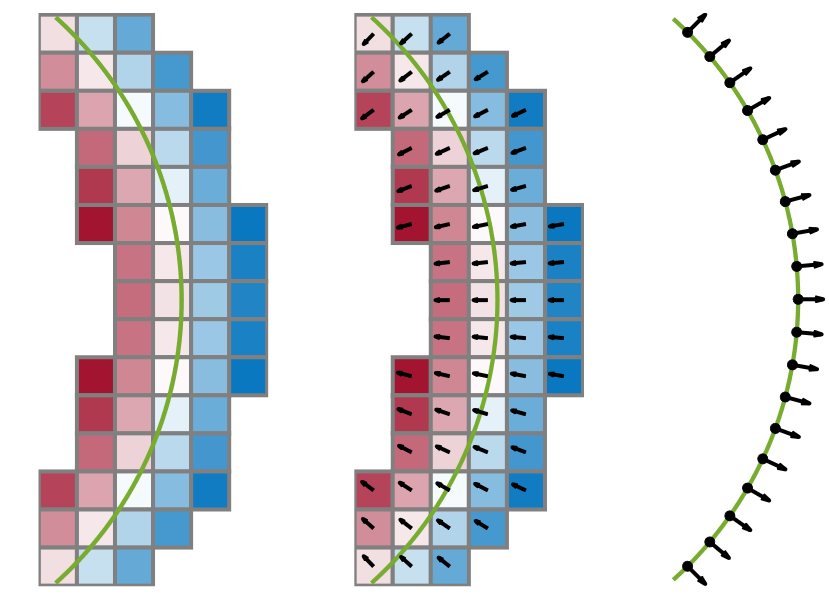
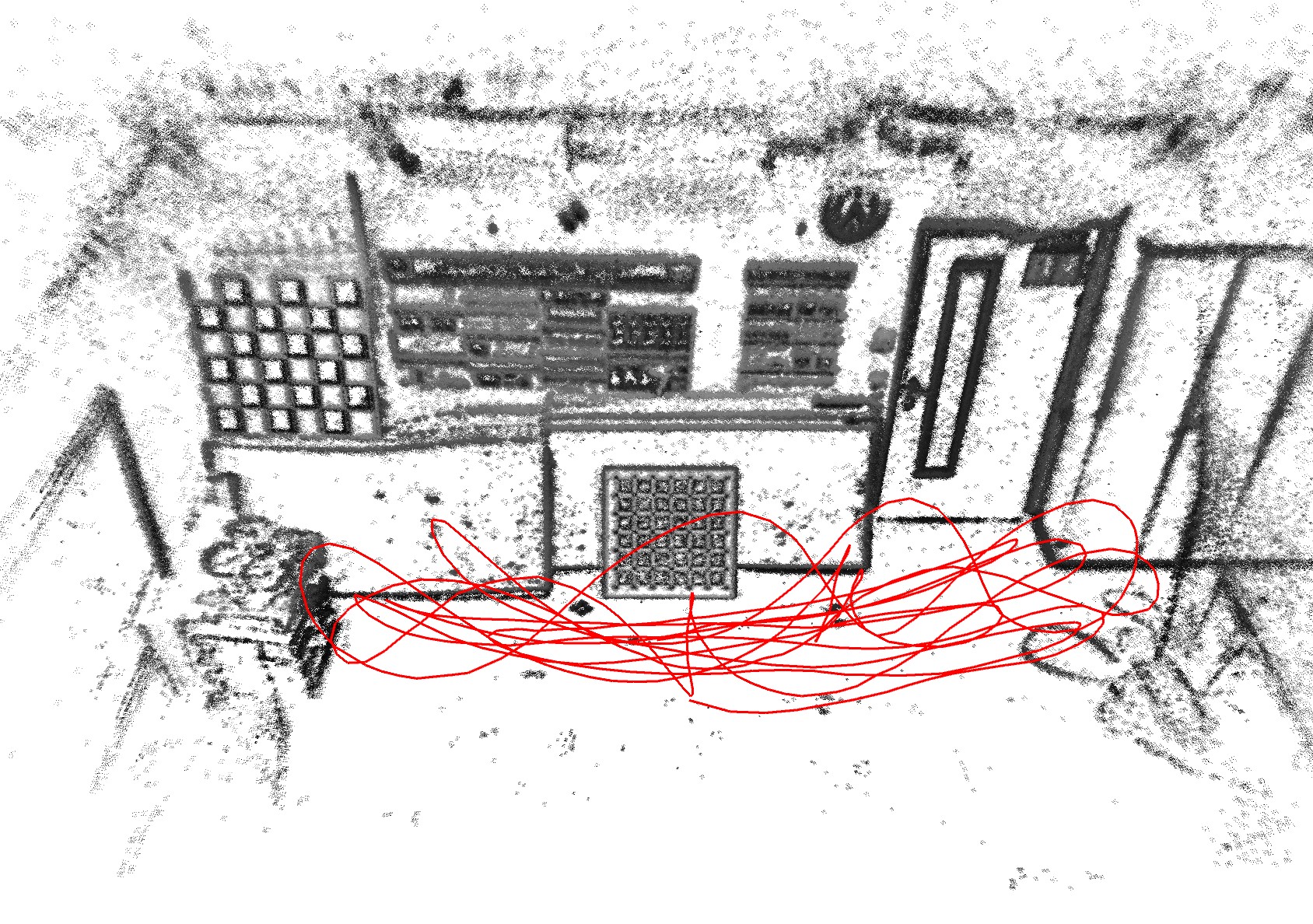
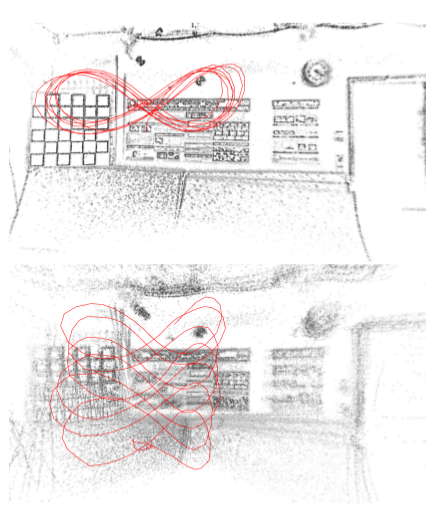
Square Root Marginalization for Sliding-Window Bundle Adjustment , In IEEE International Conference on Computer Vision (ICCV), 2021. ([project page])
2020
[] 
Efficient Derivative Computation for Cumulative B-Splines on Lie Groups , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation
2019
[] 
Rolling-Shutter Modelling for Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2019. ([arxiv])
2018
[] 
Direct Sparse Odometry With Rolling Shutter , In European Conference on Computer Vision (ECCV), 2018. ([supplementary][arxiv])
Oral Presentation [] 
The TUM VI Benchmark for Evaluating Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv])


