
School of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail:
For future updates visit my personal website.
Research Interests
Niclas’ research interests are on visual odometry and SLAM based on different sensors. His recent research activities are on map-based localization and monocular dense reconstruction.
Brief Bio
In 2013, Niclas received Master’s degrees from Karlsruhe University of Applied Sciences and from Ryerson University, respectively. Afterwards he was working towards his PhD at Karlsruhe University of Applied Sciences in collaboration with the Technical University of Munich. In 2018, Niclas defended his thesis with the title “Direct Plenoptic Odometry – Robust Tracking and Mapping with a Light Field Camera”. Between 2018 and 2019 he was working as an ADAS Perception Developer at Visteon in Karlsruhe, before joining the startup Artisense co-founded by Daniel Cremers.
Recent Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2025
[] 
VoxNeRF: Bridging Voxel Representation and Neural Radiance Fields for Enhanced Indoor View Synthesis , In IEEE Robotics and Automation Letters (RA-L), 2025.
[] 
HI-SLAM2: Geometry-Aware Gaussian SLAM for Fast Monocular Scene Reconstruction , In IEEE Transactions on Robotics, 2025. ( [project] [code])
Preprints
2022
[] 
4Seasons: Benchmarking Visual SLAM and Long-Term Localization for Autonomous Driving in Challenging Conditions , In arXiv preprint arXiv:2301.01147, 2022.
Conference and Workshop Papers
2025
[] 
TurnBack: A Geospatial Route Cognition Benchmark for Large Language Models through Reverse Route , In Empirical Methods in Natural Language Processing (EMNLP), 2025. ([code])
2023
[] 
Semidefinite Relaxations for Robust Multiview Triangulation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023.
2022
[] 
Vision-Based Large-scale 3D Semantic Mapping for Autonomous Driving Applications , In International Conference on Robotics and Automation (ICRA), 2022.
2021
[] 
TANDEM: Tracking and Dense Mapping in Real-time using Deep Multi-view Stereo , In Conference on Robot Learning (CoRL), 2021. ([GitHub][video][project page])
3DV'21 Best Demo Award [] 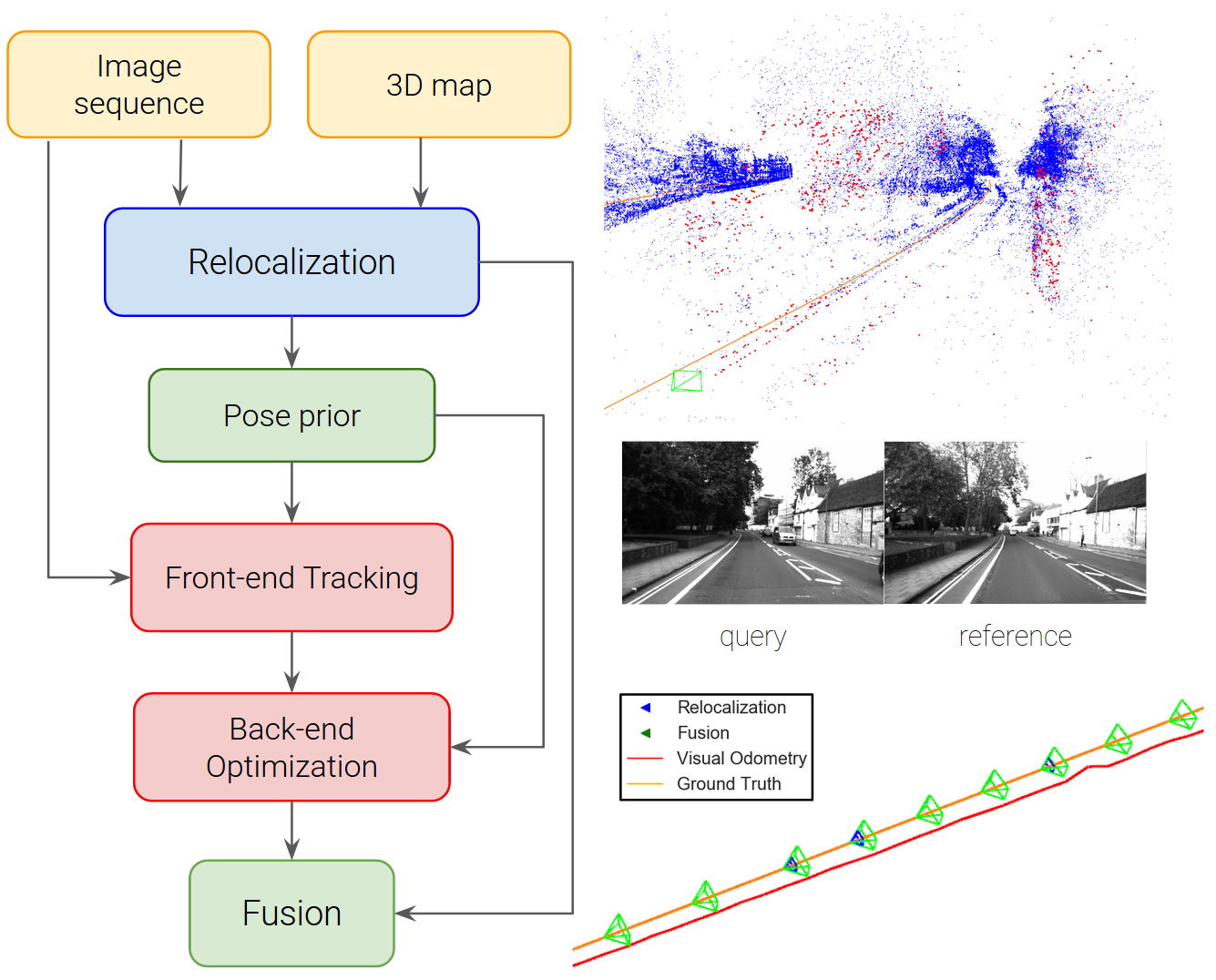
Tight Integration of Feature-based Relocalization in Monocular Direct Visual Odometry , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2021. ([project page])
[] 
MonoRec: Semi-Supervised Dense Reconstruction in Dynamic Environments from a Single Moving Camera , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([project page])
2020
[] 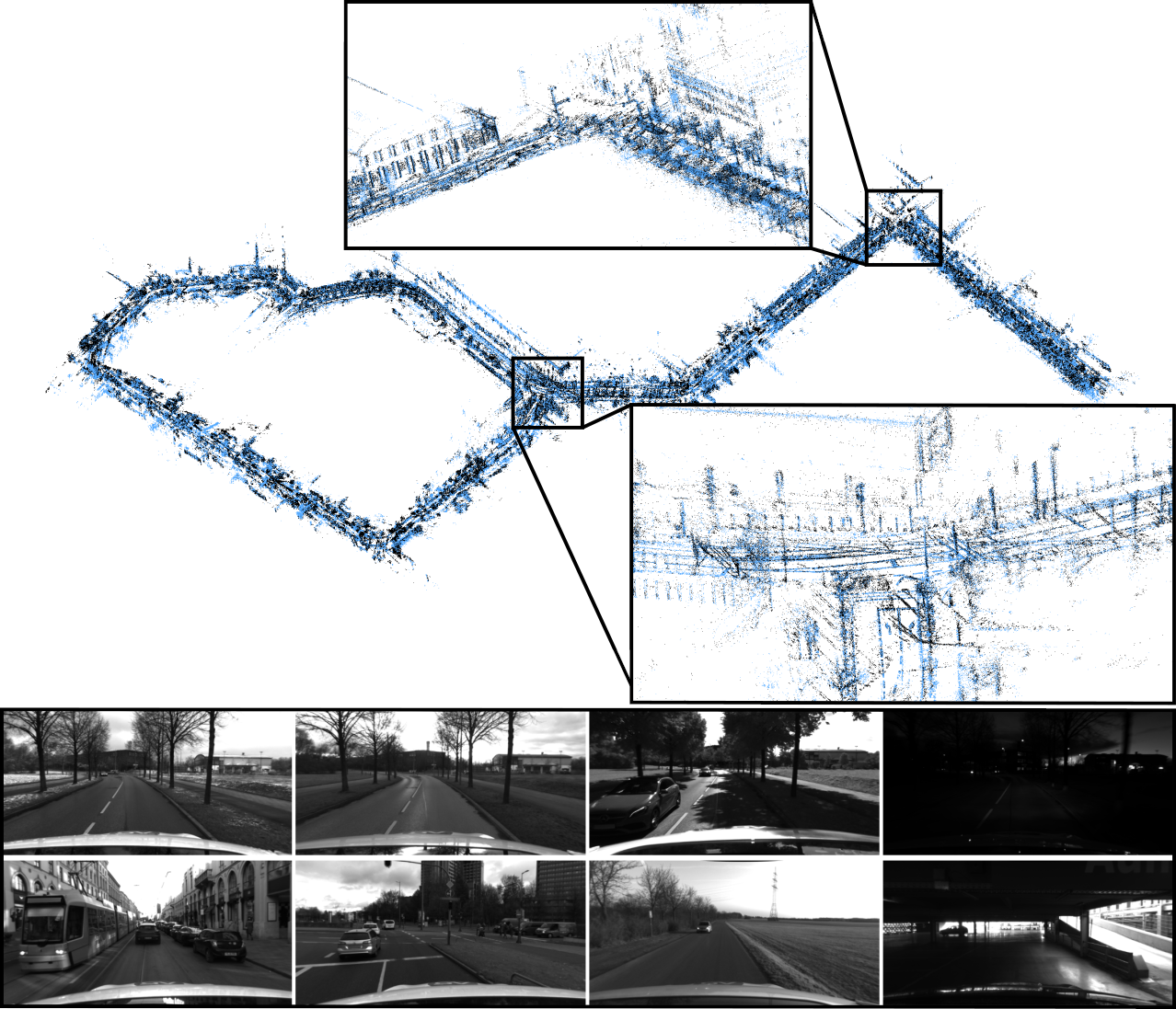
4Seasons: A Cross-Season Dataset for Multi-Weather SLAM in Autonomous Driving , In Proceedings of the German Conference on Pattern Recognition (GCPR), 2020. ([arXiv][video])


