Double Sphere Camera Model

Contact : Vladyslav Usenko, Nikolaus Demmel.
Vision-based motion estimation and 3D reconstruction, which have numerous applications (e.g., autonomous driving, navigation systems for airborne devices and augmented reality) are receiving significant research attention. To increase the accuracy and robustness, several researchers have recently demonstrated the benefit of using large field-of-view cameras for such applications.
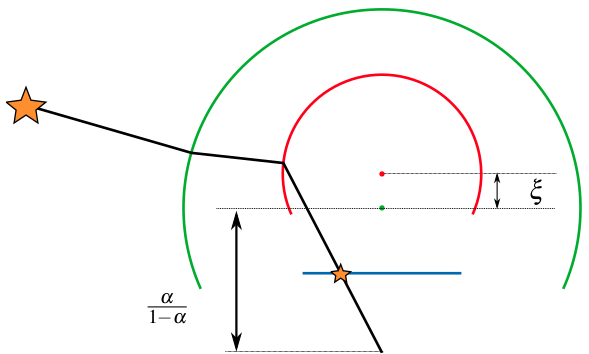
In this paper, we provide an extensive review of existing models for large field-of-view cameras. For each model we provide projection and unprojection functions and the subspace of points that result in valid projection. Then, we propose the Double Sphere camera model that well fits with large field-of-view lenses, is computationally inexpensive and has a closed-form inverse. We evaluate the model using a calibration dataset with several different lenses and compare the models using the metrics that are relevant for Visual Odometry, i.e., reprojection error, as well as computation time for projection and unprojection functions and their Jacobians. We also provide qualitative results and discuss the performance of all models.
Export as PDF, XML, TEX or BIB
Conference and Workshop Papers
2025
[] 
The Monado SLAM Dataset for Egocentric Visual-Inertial Tracking , In International Conference on Intelligent Robots and Systems (IROS), 2025. ([project page])
2018
[] 
The Double Sphere Camera Model , In Proc. of the Int. Conference on 3D Vision (3DV), 2018. ([arxiv])
Open-Source Calibration Tool

The open-source code for calibration is available here:
https://gitlab.com/VladyslavUsenko/basalt.
(GitHub mirror: https://github.com/VladyslavUsenko/basalt-mirror)
Follow the corresponding tutorial to see the examples on Euroc, TUM-VI and UZH dataset calibration sequences.
Datasets and Calibration Results

| Lens | Dataset 1 | Dataset 2 | Dataset 3 | |||
| BF2M2020S23 | BF2M2020S23-1.bag | results | BF2M2020S23-2.bag | results | BF2M2020S23-3.bag | results |
| BF5M13720 | BF5M13720-1.bag | results | BF5M13720-2.bag | results | BF5M13720-3.bag | results |
| BM4018S118 | BM4018S118-1.bag | results | BM4018S118-2.bag | results | BM4018S118-3.bag | results |
| BM2820 | BM2820-1.bag | results | BM2820-2.bag | results | BM2820-3.bag | results |
| GOPRO | GOPRO-1.bag | results | GOPRO-2.bag | results | GOPRO-3.bag | results |
| EUROC | EUROC.bag | results | ||||

Kalibr Example
We have contributed the implementation of Extended Unified Camera Model (EUCM) and Double Sphere Camera Model (DS) to open-source calibration tool Kalibr. See Supported Camera Models and examples below for details.

The example of multi-camera and IMU calibration for Euroc dataset is shown below (results):
#!/bin/bash
MODELS=(omni-none omni-radtan ds-none eucm-none pinhole-equi)
mkdir euroc
cd euroc
wget http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/calibration_datasets/imu_april/imu_april.bag
wget http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/calibration_datasets/imu_april/april_6x6.yaml
wget http://robotics.ethz.ch/~asl-datasets/ijrr_euroc_mav_dataset/calibration_datasets/cam_april/cam_april.bag
cat > imu.yaml <<- EOM
gyroscope_noise_density: 1.6968e-04
gyroscope_random_walk: 1.9393e-05
accelerometer_noise_density: 2.0000e-3
accelerometer_random_walk: 3.0000e-3
rostopic: /imu0
update_rate: 200.0
EOM
for m in "${MODELS[@]}"
do
mkdir ${m}
cd ${m}
kalibr_calibrate_cameras --bag ../cam_april.bag --topics /cam0/image_raw /cam1/image_raw --models ${m} ${m} --target ../april_6x6.yaml --bag-from-to 20 40 --dont-show-report > out_cam.txt 2>&1
kalibr_calibrate_imu_camera --target ../april_6x6.yaml --cam camchain-..cam_april.yaml --imu ../imu.yaml --bag ../imu_april.bag --dont-show-report > out_imu.txt 2>&1
cd ..
done
Another example of multi-camera and IMU calibration for TUM-VI dataset is shown below (results):
#!/bin/bash
MODELS=(omni-none omni-radtan ds-none eucm-none pinhole-equi)
mkdir tumvi
cd tumvi
wget https://vision.in.tum.de/_media/data/datasets/visual-inertial-dataset/april_6x6_80x80cm.zip
unzip april_6x6_80x80cm.zip
wget https://cdn3.vision.in.tum.de/tumvi/calibrated/512_16/dataset-calib-cam1_512_16.bag
wget https://cdn3.vision.in.tum.de/tumvi/calibrated/512_16/dataset-calib-imu3_512_16.bag
cat > imu.yaml <<- EOM
accelerometer_noise_density: 0.0028
accelerometer_random_walk: 0.00086
gyroscope_noise_density: 0.00016
gyroscope_random_walk: 0.000022
rostopic: /imu0
update_rate: 200.0
EOM
for m in "${MODELS[@]}"
do
mkdir ${m}
cd ${m}
kalibr_calibrate_cameras --bag ../dataset-calib-cam1_512_16.bag --topics /cam0/image_raw /cam1/image_raw --models ${m} ${m} --target ../april_6x6_80x80cm.yaml --dont-show-report > out_cam.txt 2>&1
kalibr_calibrate_imu_camera --target ../april_6x6_80x80cm.yaml --cam camchain-..dataset-calib-cam1_512_16.yaml --imu ../imu.yaml --bag ../dataset-calib-imu3_512_16.bag --dont-show-report > out_imu.txt 2>&1
cd ..
done
Example of camera calibration for the Double Sphere paper dataset (results):
#!/bin/bash
MODELS=(
omni-none
omni-radtan
ds-none
eucm-none
pinhole-equi
)
BAGS=(
BF2M2020S23-1
BF5M13720-1
BM4018S118-1
BM2820-1
GOPRO-1
BF2M2020S23-2
BF5M13720-2
BM4018S118-2
BM2820-2
GOPRO-2
BF2M2020S23-3
BF5M13720-3
BM4018S118-3
BM2820-3
GOPRO-3
EUROC
)
MAX_JOBS=8
parallel () {
while [ "$(jobs | wc -l)" -ge $MAX_JOBS ]
do
wait -n
done
"$@" &
}
mkdir ds
cd ds
wget https://vision.in.tum.de/_media/data/datasets/visual-inertial-dataset/april_6x6_80x80cm.zip
unzip april_6x6_80x80cm.zip
for b in "${BAGS[@]}"; do
wget https://cdn3.vision.in.tum.de/double-sphere/dataset1/${b}.bag
done
for b in "${BAGS[@]}"; do
mkdir $b
cd $b
for m in "${MODELS[@]}"
do
mkdir ${m}
cd ${m}
parallel kalibr_calibrate_cameras --bag ../../${b}.bag --topics /cam0/image_raw --models ${m} --target ../../april_6x6_80x80cm.yaml --dont-show-report > calibration_out.txt 2>&1
cd ..
done
cd ..
done
Note: Kalibr fails to calibrate pinhole-equi on the TUMVI calibration sequence, which might be a limitation of the model implementation by Kalibr. First, Kalibr implements Kannala-Brandt (which corresponds to pinhole-equi in Kalibr) as pinhole+distortion, which limits it to below field-of-view below 180 deg. The tested lens has 190 deg FOV. Second, Kalibr does initialization by optimizing with a single image, which may result in divergence when the parameters are not well constrained by a single image. We found with our own calibration tool that the Kanala-Brandt model can fit the lens quite well.


