
Lukas von Stumberg
Technical University of Munich
School of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail: LStumberg@outlook.com
Research Interests
My research interests are visual and visual-inertial SLAM, robotics, and 3D reconstruction. I like to apply both traditional methods and deep learning.
Selected Projects
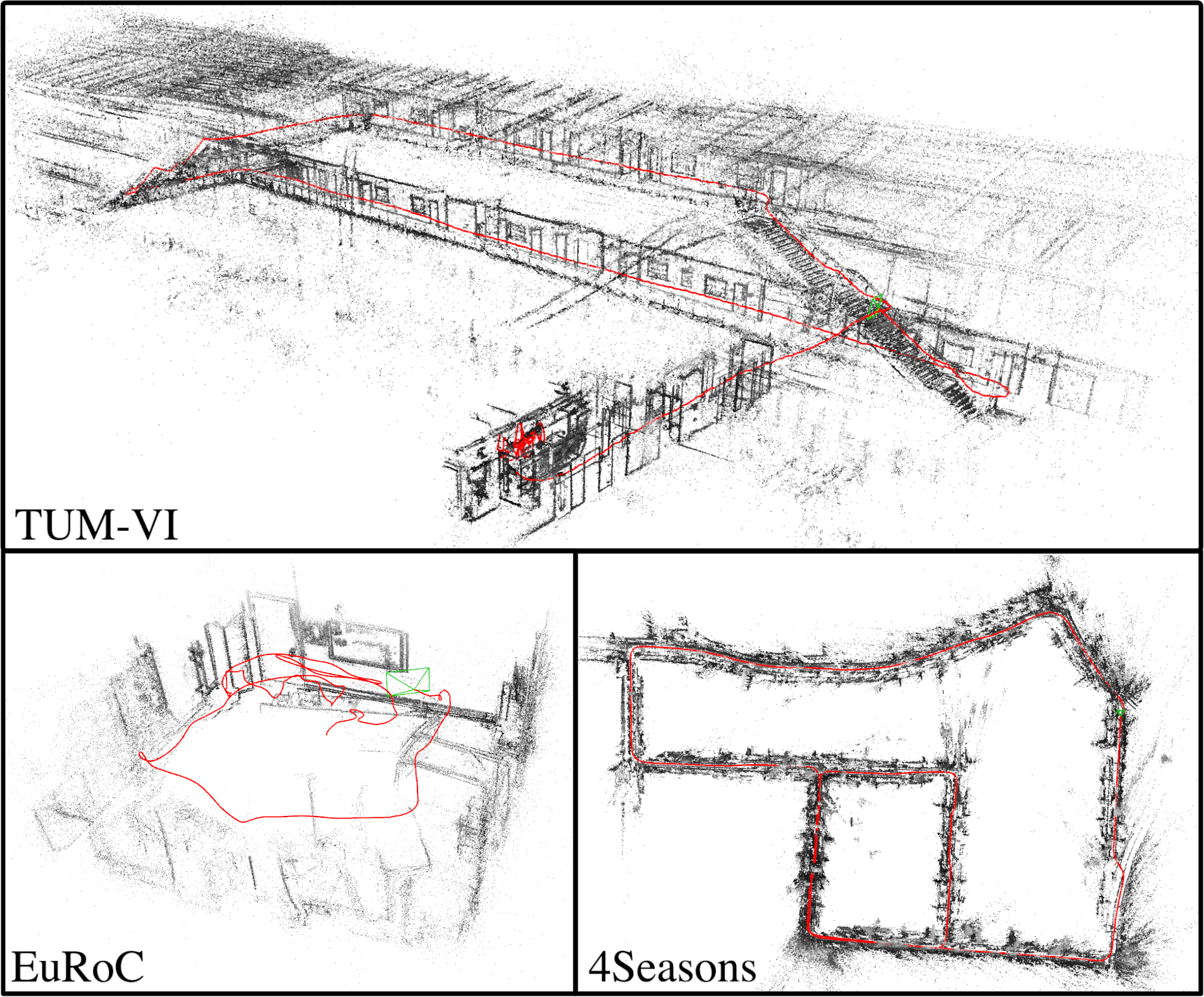
DM-VIO: Delayed Marginalization Visual-Inertial Odometry
An open-source visual-inertial odometry system with state-of-the art results. See https://github.com/lukasvst/dm-vio
LM-Reloc: Levenberg-Marquardt Based Direct Visual Relocalization
As a follow-up of our previous work GN-Net, LM-Reloc boosts the performance of direct image alignment for relocalization using a novel loss formulation, and a pose estimation network.
GN-Net: The Gauss-Newton Loss for Multi-Weather Relocalization
Using our novel Gauss-Newton loss we improve the robustness of direct methods against strong illumination changes and bad initializations. This allows us to accurately relocalize between different weathers. Project Page
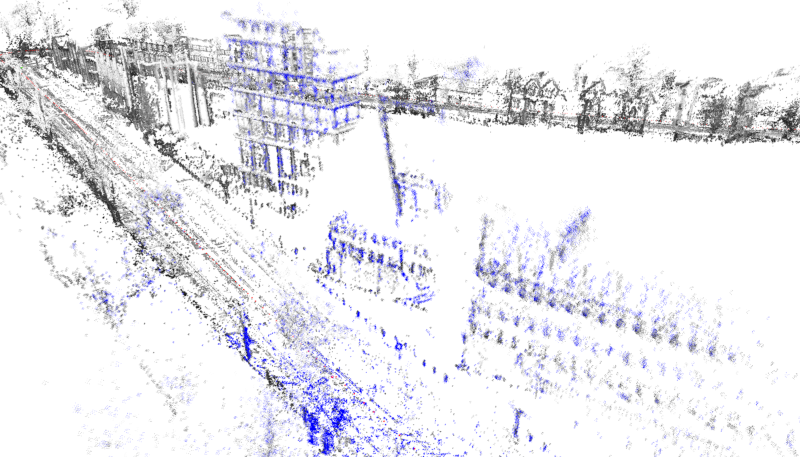
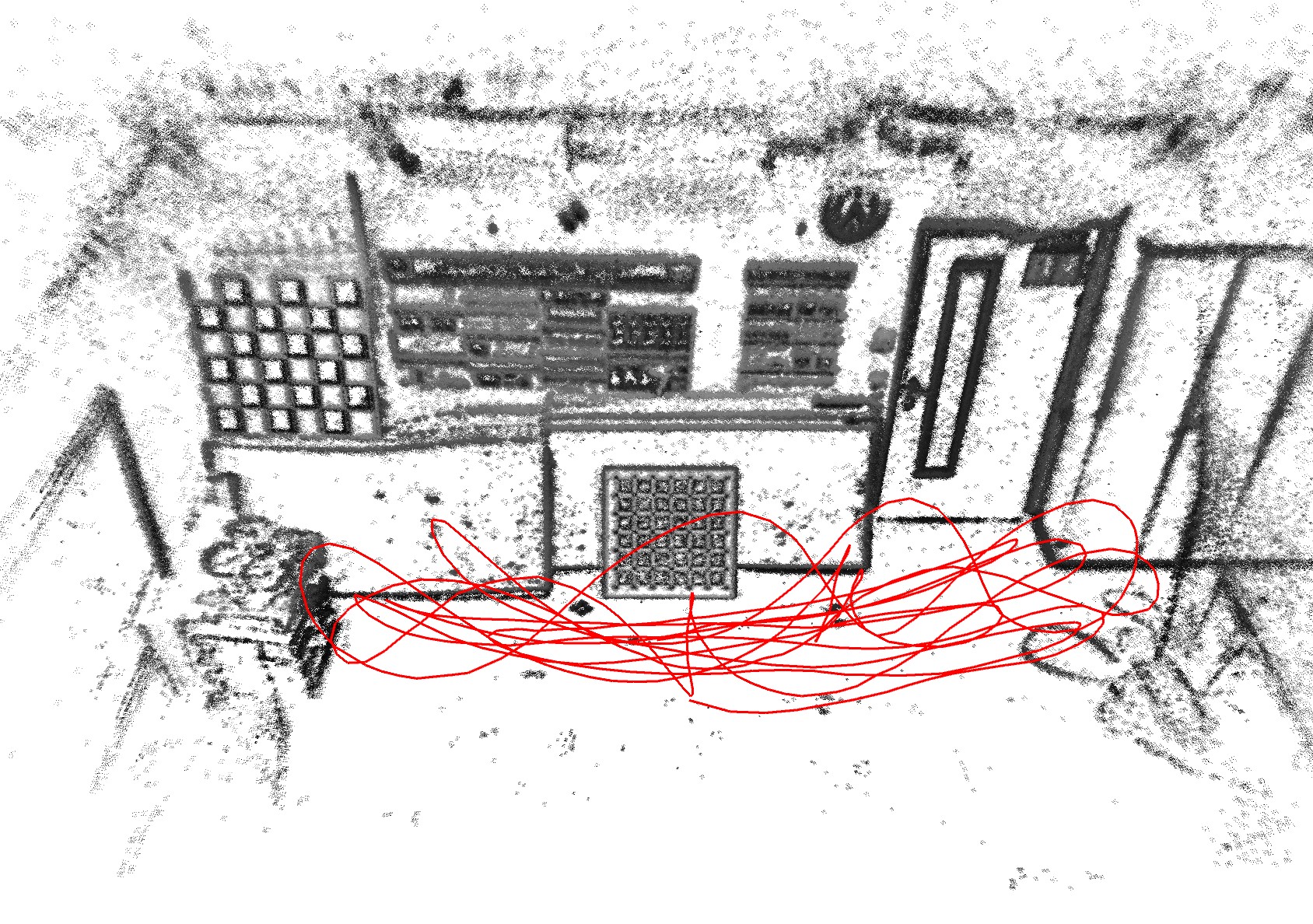
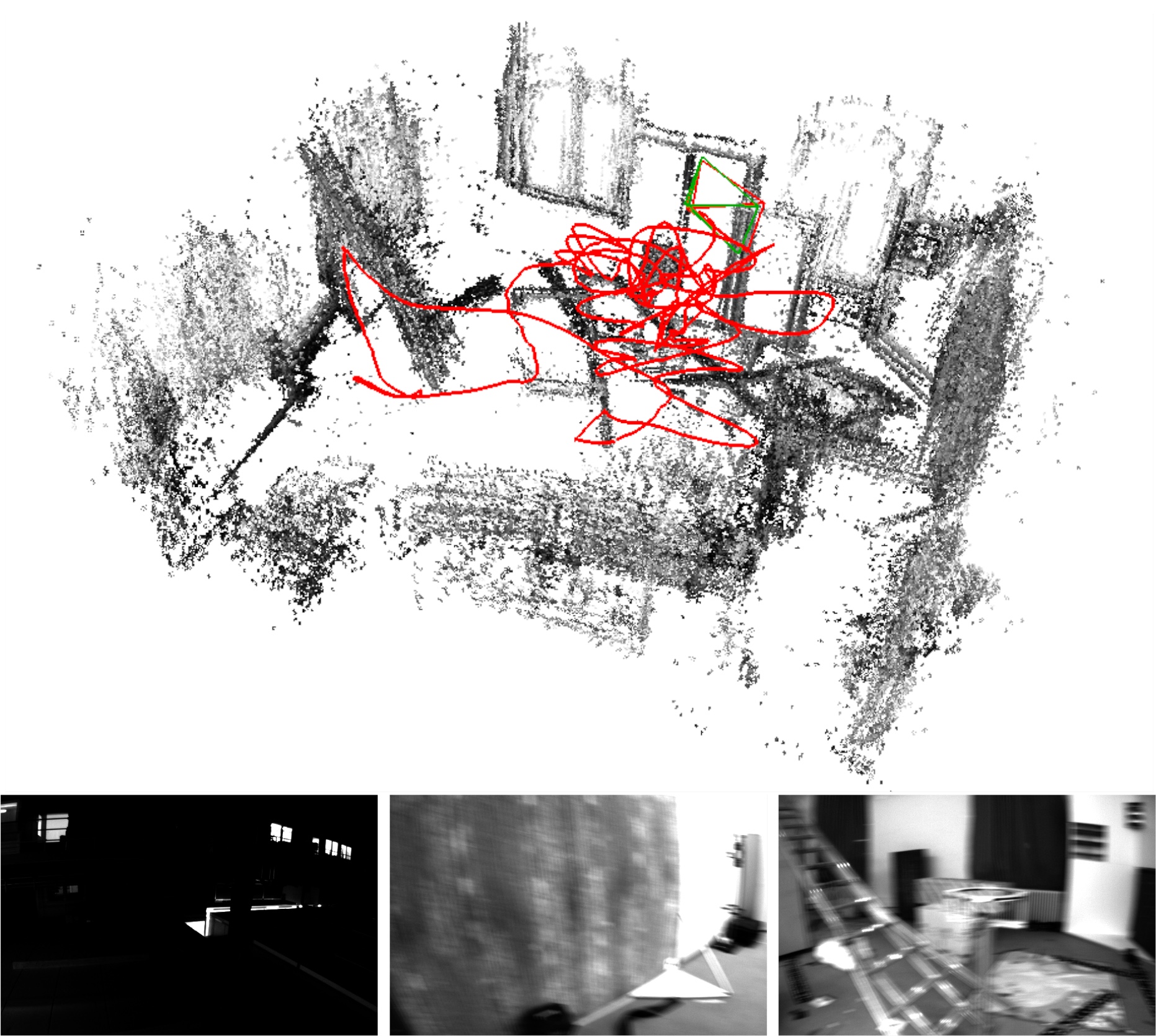
VI-DSO: Direct Sparse Visual-Inertial Odometry using Dynamic Marginalization
In my Master thesis on direct visual-inertial odometry we demonstrate state-of-the-art performance on the EuRoC dataset. Project Page
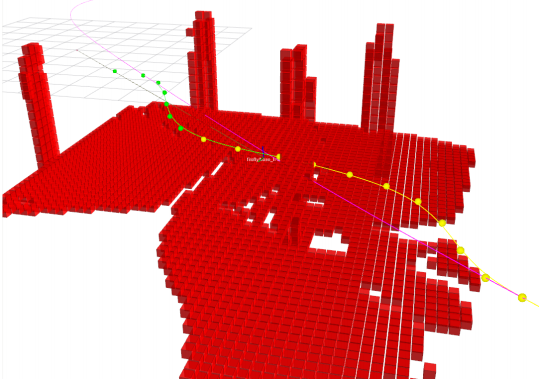
From Monocular SLAM to Autonomous Drone Exploration
In my Bachelor thesis I have used LSD-SLAM to explore an unknown environment with an autonomous drone.
Export as PDF, XML, TEX or BIB
Book Chapters
2020
[] 
TUM Flyers: Vision—Based MAV Navigation for Systematic Inspection of Structures , Chapter in Bringing Innovative Robotic Technologies from Research Labs to Industrial End-users (F. Caccavale, C. Ott, B. Winkler, Z. Taylor, eds.), Springer International Publishing, 2020.
2019
[] 
A Review and Quantitative Evaluation of Direct Visual–Inertial Odometry , Chapter in Multimodal Scene Understanding (M. Yang, B. Rosenhahn, V. Murino, eds.), Academic Press, 2019.
Journal Articles
2022
[] 
DM-VIO: Delayed Marginalization Visual-Inertial Odometry , In IEEE Robotics and Automation Letters (RA-L) & International Conference on Robotics and Automation (ICRA), volume 7, 2022. ([arXiv][video][project page][supplementary][code])
2020
[] 
GN-Net: The Gauss-Newton Loss for Multi-Weather Relocalization , In IEEE Robotics and Automation Letters (RA-L), volume 5, 2020. ([arXiv][video][project page][supplementary])
2018
[] 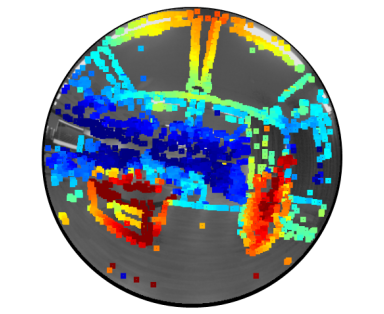
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras , In IEEE Robotics and Automation Letters & Int. Conference on Intelligent Robots and Systems (IROS), IEEE, 2018. ([arxiv])
Conference and Workshop Papers
2021
[] 
MonoRec: Semi-Supervised Dense Reconstruction in Dynamic Environments from a Single Moving Camera , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([project page])
2020
[] 
LM-Reloc: Levenberg-Marquardt Based Direct Visual Relocalization , In International Conference on 3D Vision (3DV), 2020. ([arXiv][project page][video][supplementary][poster])
[] 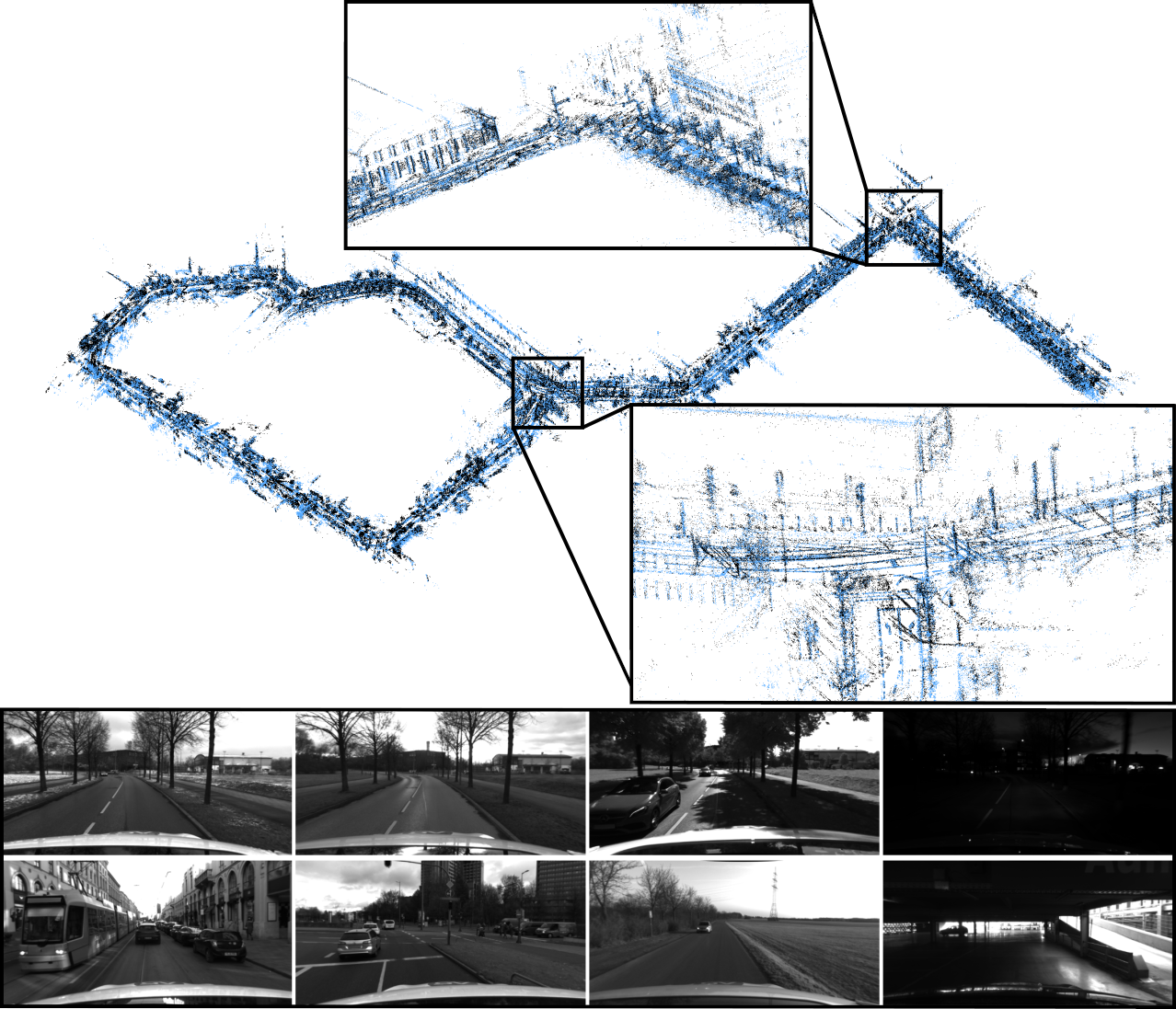
4Seasons: A Cross-Season Dataset for Multi-Weather SLAM in Autonomous Driving , In Proceedings of the German Conference on Pattern Recognition (GCPR), 2020. ([arXiv][video])
[] 
D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation
2019
[] 
Rolling-Shutter Modelling for Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2019. ([arxiv])
2018
[] 
Direct Sparse Visual-Inertial Odometry using Dynamic Marginalization , In International Conference on Robotics and Automation (ICRA), 2018. ([supplementary][video][arxiv])
2017
[] 
Real-Time Trajectory Replanning for MAVs using Uniform B-splines and a 3D Circular Buffer , In International Conference on Intelligent Robots and Systems (IROS), 2017. ([arxiv])
Best Paper Award - Finalist (link) [] 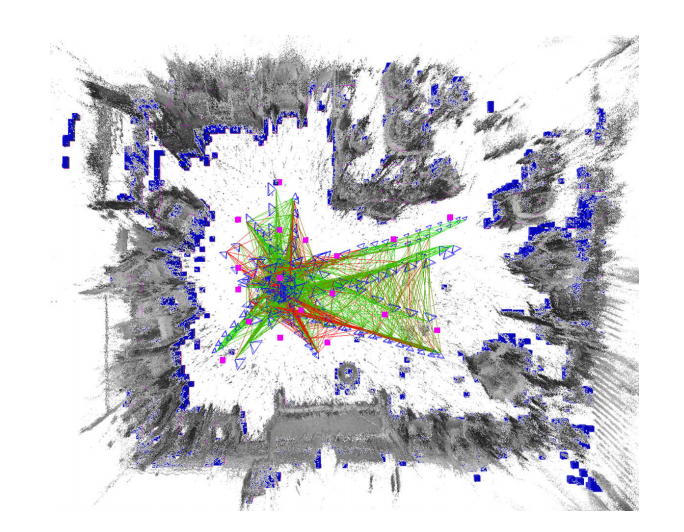
From Monocular SLAM to Autonomous Drone Exploration , In European Conference on Mobile Robots (ECMR), 2017. ([arXiv])


