Technical University of Munich
School of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail:
Research Interests
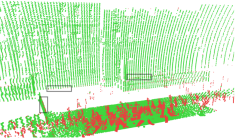
I'm interested in camera based 3D reconstructions of large scenes. Current work includes the usage of a handheld RGBD-Camera to scan rooms, next steps will be the usage of quadcopters to cover larger areas and scan full buildings.
My Master's Thesis is about using a Kinect-Projector System to project undistorted images on arbitrary surfaces.
Brief Bio
| 2005 - 2008 | pre-Diploma (Vordiplom) in Physics (minor Computer Science) at the University of Freiburg |
| 2008 - 2009 | Bachelor in Computer Science (minor Physics) at the University of Freiburg |
| 05.2009 - 06.2009 | Internship at SICK AG, Waldkirch |
| 09.2009 - 05.2010 | Erasmus student at ETH Zurich |
| 06.2010 - 12.2010 | Six-month internship at Daimler AG, R&D Driving Assistance Systems, Ulm |
| 08.2011 - 03.2012 | Student Researcher at Autonomous Intelligent Systems Lab, Prof. Burgard |
| 05.2012 - | Master Thesis at TU Munich |
Teaching Experience
- Tutor for several undergrad courses at the University of Freiburg
- Summer Semester 2012: Teaching Assistant for Lecture: Visual Navigation for Flying Robots
Prizes and Scholarships
since 2008: Scholarship from the Foundation of German Business (Stiftung der Deutschen Wirtschaft)
since 2009: Scholarship from the German National Academic Foundation (Studienstiftung des deutschen Volkes)
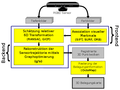
2011: Most-Useful-Award for a team entry to the ROS 3D Contest by Willow Garage
2012: Finalist (Top 10) in the Siemens Student Award Germany 2012
2012: Second Prize at Idea Challenge organized by the CDTM
Export as PDF, XML, TEX or BIB