This is an old revision of the document!

PhD student
Technical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail: yangn@in.tum.de
News
- [09.2019] One paper accepted for CoRL 2019, Osaka.
- [07.2018] One paper accepted for ECCV 2018, Munich – oral (2.5%, link).
- [06.2018] One paper accepted for IROS 2018, Madrid.
- [05.2018] One paper accepted for publication in RA-L.
Research Interests
My research interests lie in incorporating deep learning into visual odometry and SLAM.
Deep Virtual Stereo Odometry (DVSO) – Project Page
Brief Bio
Nan Yang received his Bachelor's degree in Computer Science from Beijing University of Posts and Telecommunications and his Master's degree in Informatics from the Technical University of Munich. Since May 2018, he is a PhD student and senior computer vision & AI researcher in Artisense, a startup co-founded by Prof. Daniel Cremers.
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2018
[] 
Challenges in Monocular Visual Odometry: Photometric Calibration, Motion Bias and Rolling Shutter Effect , In In IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robots and Systems (IROS), volume 3, 2018. ([arxiv])
Preprints
2022
[] 
4Seasons: Benchmarking Visual SLAM and Long-Term Localization for Autonomous Driving in Challenging Conditions , In arXiv preprint arXiv:2301.01147, 2022.
Conference and Workshop Papers
2024
[] FIRe: Fast Inverse Rendering Using Directional and Signed Distance Functions , In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2024. ([Project page],[ArXiv])
2023
[] 
Behind the Scenes: Density Fields for Single View Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023. ([project page])
2021
[] 
TANDEM: Tracking and Dense Mapping in Real-time using Deep Multi-view Stereo , In Conference on Robot Learning (CoRL), 2021. ([GitHub][video][project page])
3DV'21 Best Demo Award [] 
MonoRec: Semi-Supervised Dense Reconstruction in Dynamic Environments from a Single Moving Camera , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([project page])
2020
[] 
LM-Reloc: Levenberg-Marquardt Based Direct Visual Relocalization , In International Conference on 3D Vision (3DV), 2020. ([arXiv][project page][video][supplementary][poster])
[] 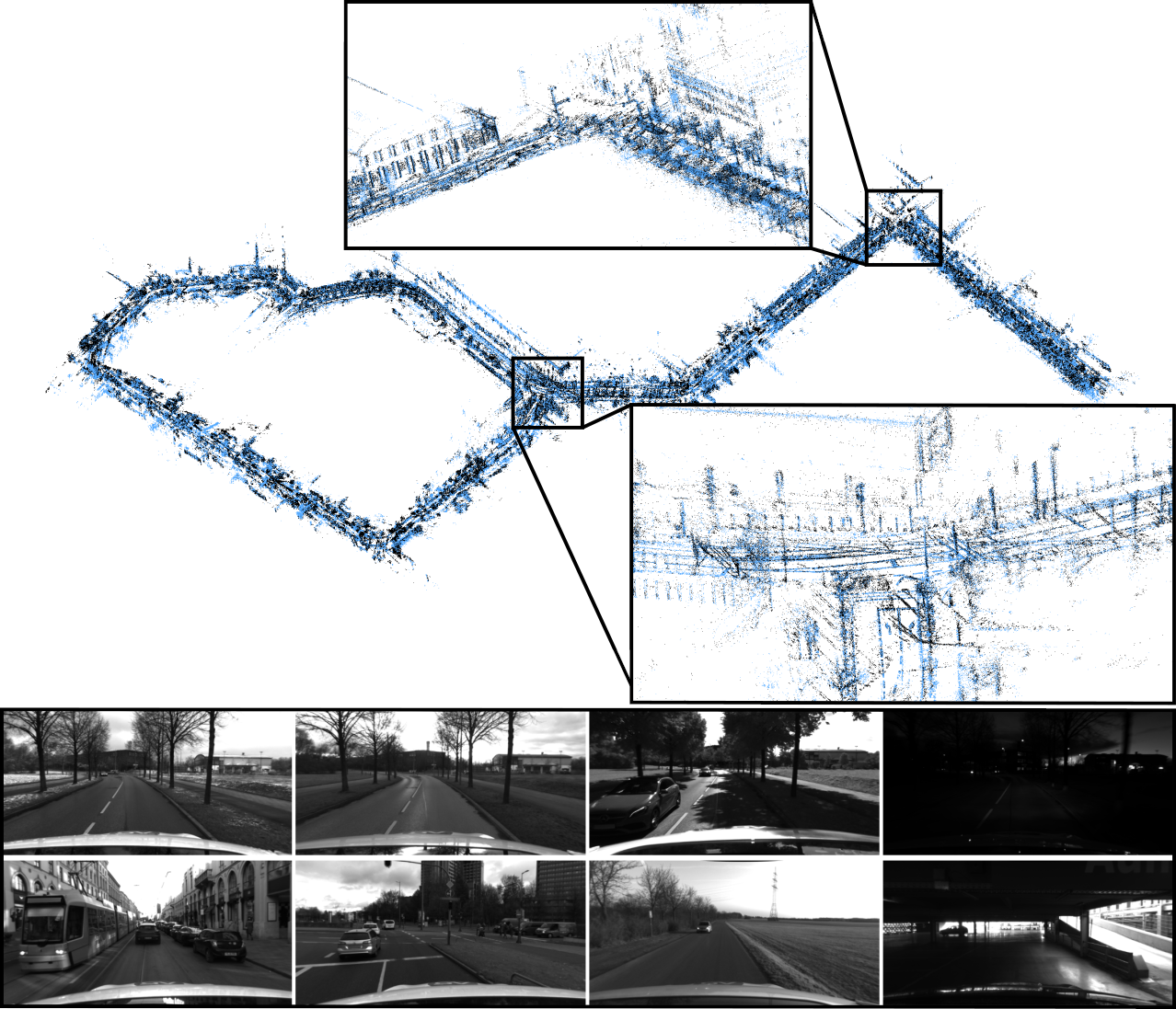
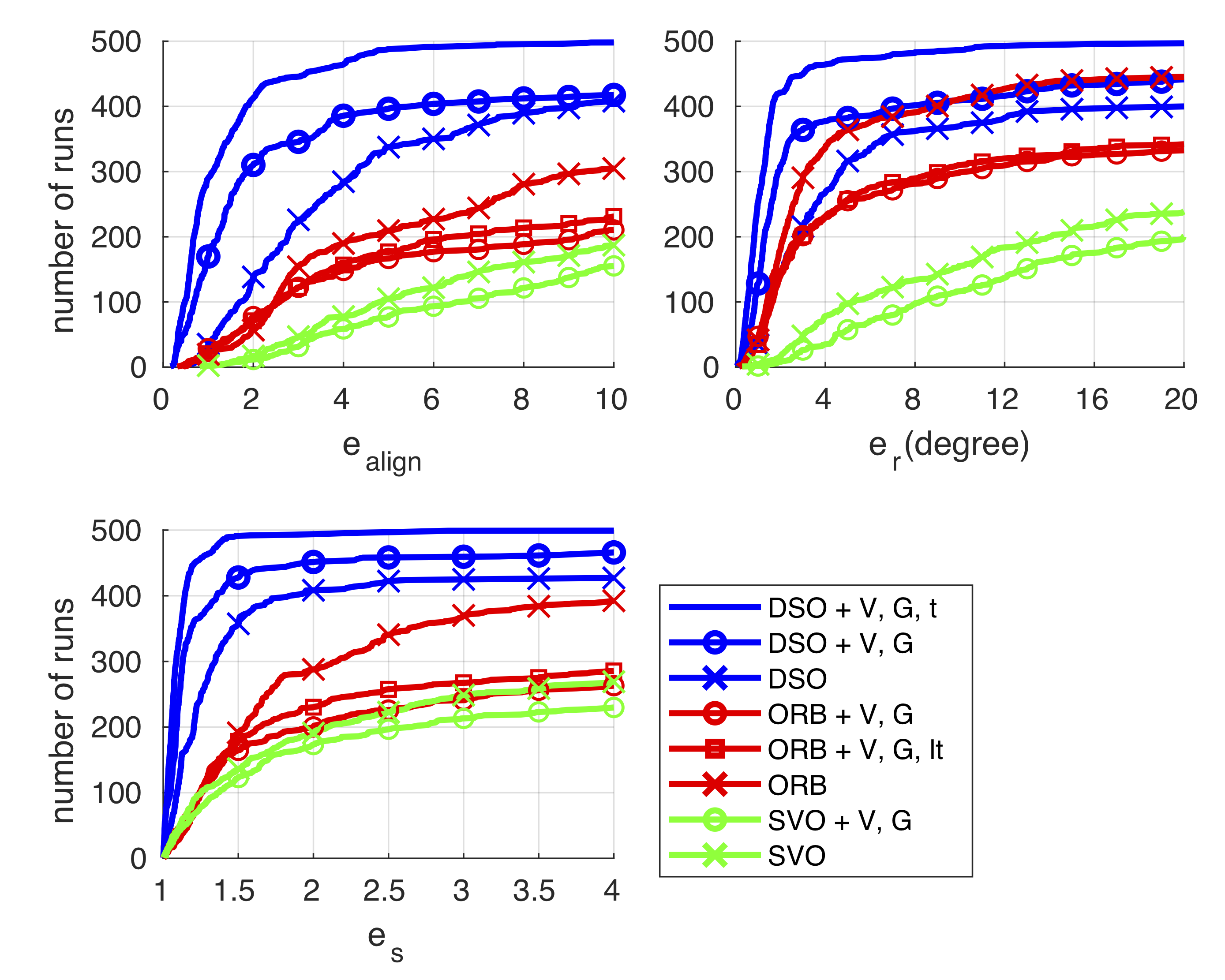
4Seasons: A Cross-Season Dataset for Multi-Weather SLAM in Autonomous Driving , In Proceedings of the German Conference on Pattern Recognition (GCPR), 2020. ([arXiv][video])
[] 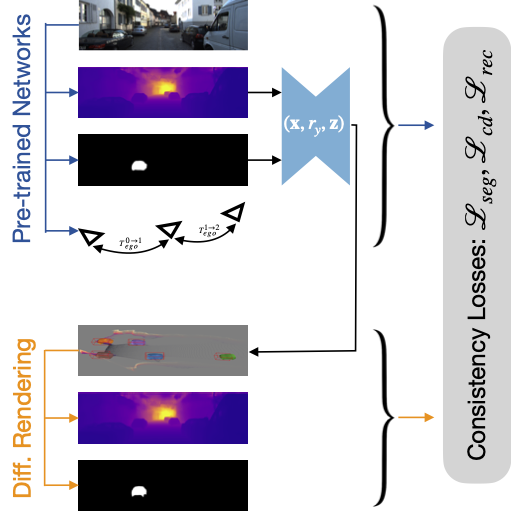
Learning Monocular 3D Vehicle Detection without 3D Bounding Box Labels , In Proceedings of the German Conference on Pattern Recognition (GCPR), 2020. ([project page][video])
[] 
D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation [] 
DirectShape: Photometric Alignment of Shape Priors for Visual Vehicle Pose and Shape Estimation , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2020. ([video][presentation][project page][supplementary][arxiv])
2019
[] 
Multi-Frame GAN: Image Enhancement for Stereo Visual Odometry in Low Light , In Conference on Robot Learning (CoRL), 2019. ([arxiv],[supplementary],[video])
Full Oral Presentation
2018
[] 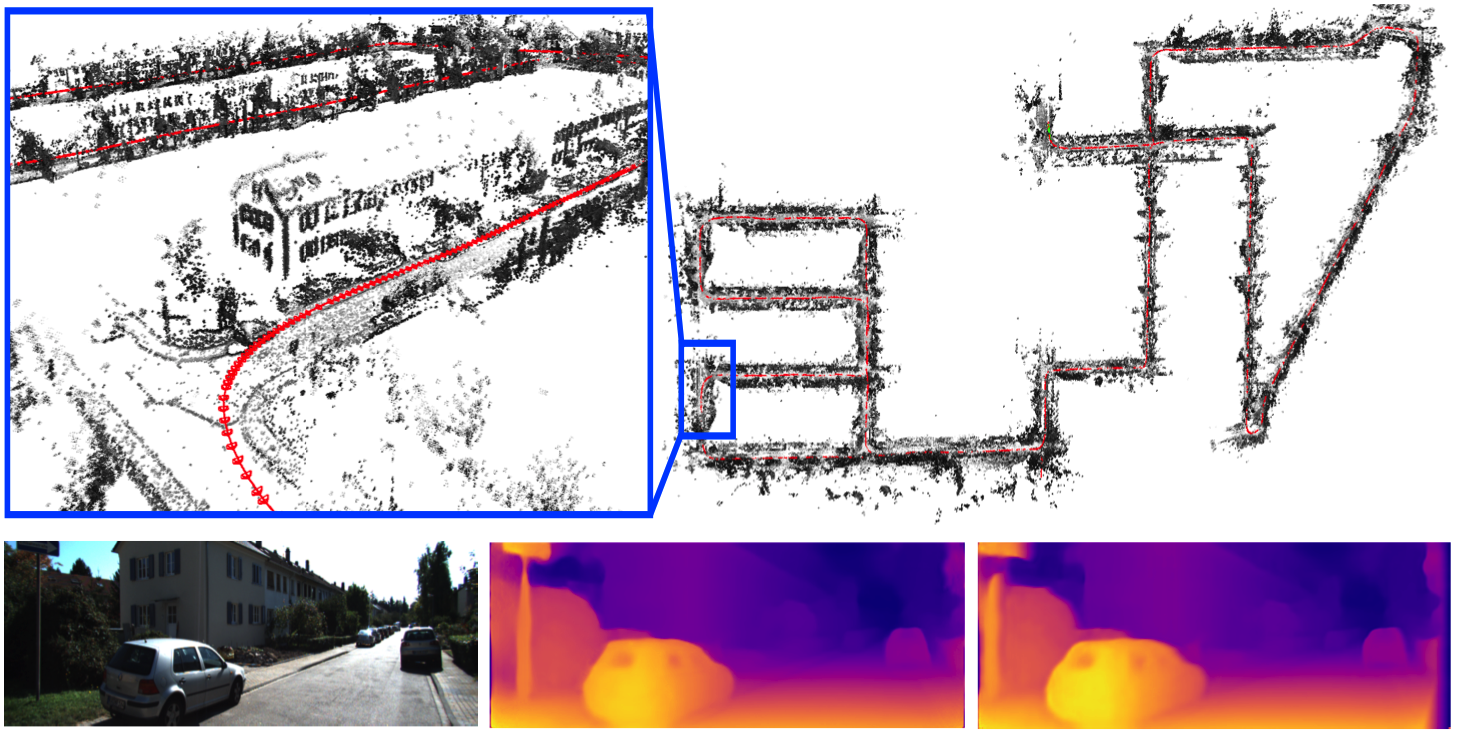
Deep Virtual Stereo Odometry: Leveraging Deep Depth Prediction for Monocular Direct Sparse Odometry , In European Conference on Computer Vision (ECCV), 2018. ([arxiv],[supplementary],[project])
Oral Presentation


