Contact: Jörg Stückler, Jakob Engel, Christian Kerl, Vladyslav Usenko
In recent years, flying robots such as quadrocopters have gained increased interest in robotics and computer vision research. To navigate safely, these robots need the ability to localize themselves autonomously using their onboard sensors. Potential applications of such systems include the usage as a flying camera, for example to record sport movies or to inspect bridges from the air, as well as surveillance tasks and applications in agriculture.
Our research on MAVs is supported by the DFG Research Unit 1505 "Mapping on Demand".
From a scientific perspective, the goal to create autonomously flying robots leads to an interesting set of (yet) unsolved research problems. Challenges include a limited payload (and thus limited processing power and sensors) as well as the requirement to localize and navigate in a 3D environment.
We are in particular interested in using monocular, stereo and RGB-D cameras as the main sensor. We are currently working on dense visual odometry to reduce the drift of flying robots and dense 3D reconstruction to create volumetric models of the environment (e.g., for path planning and collision avoidance).
In the summer term, we teach a class on Vision-based Navigation where teams of students implement their own ideas in a semester project on Crazyflie nanocopters, Parrot Ardrone and Bebop quadrocopters.
If you are interested in a bachelor/master thesis project in this area, please contact us.
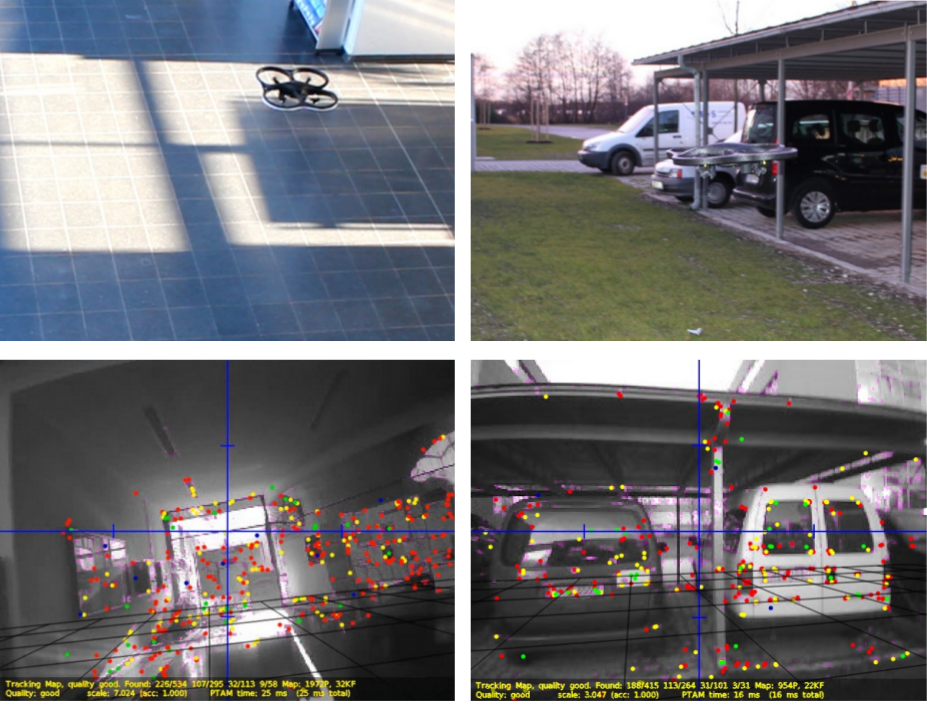
This video demonstrates our camera-based navigation method for the Parrot AR.Drone as presented at the IROS12. The complete software is available as open-source ROS package: tum_ardrone
This video shows a demonstration of our camera-based navigation shown at the open day 2011 of the Technical University of Munich in the Computer Science Building in Garching.
Recently, we extended the Gazebo simulator so that it can be used as a transparent replacement for the Parrot AR.Drone quadrocopter. This allows us to develop and evaluate our approaches more quickly because we don't need to run them on a real quadrocopter all the time. The software (including documentation) has been released as an open-source package in ROS: tum_simulator
Export as PDF, XML, TEX or BIB
|
| Journal Articles
|
| 2014
|
| [] |  | Scale-Aware Navigation of a Low-Cost Quadrocopter with a Monocular Camera (J. Engel, J. Sturm and D. Cremers), In Robotics and Autonomous Systems (RAS), volume 62, 2014.
|
|
| Conference and Workshop Papers
|
| 2013
|
| [] |  | Graph-based bundle adjustment for INS-camera calibration (D. Bender, M. Schikora, J. Sturm and D. Cremers), In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
Best research paper award |
| [] |  | Dense Tracking and Mapping with a Quadrocopter (J. Sturm, E. Bylow, F. Kahl and D. Cremers), In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
|
| [] |  | FollowMe: Person Following and Gesture Recognition with a Quadrocopter (T. Naseer, J. Sturm and D. Cremers), In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013.
|
| 2012
|
| [] |  | Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing (J. Engel, J. Sturm and D. Cremers), In Proc. of the Workshop on Visual Control of Mobile Robots (ViCoMoR) at the IEEE/RJS International Conference on Intelligent Robot Systems (IROS), 2012.
|
| [] |  | Camera-Based Navigation of a Low-Cost Quadrocopter (J. Engel, J. Sturm and D. Cremers), In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
|
|
| Other Publications
|
| 2013
|
| [] |  | Lecture Notes: Visual Navigation for Flying Robots (J. Sturm), Technische Universität München, Germany, 2013.
Distinguished with the TUM TeachInf Award for the best lecture in summer term 2013 |
| 2012
|
| [] |  | Lecture Notes: Visual Navigation for Flying Robots (J. Sturm), Technische Universität München, Germany, 2012.
Distinguished with the TUM TeachInf Award for the best lecture in summer term 2012 |
| [] |  | Odometry from RGB-D Cameras for Autonomous Quadrocopters (C. Kerl), Master's thesis, Technical University Munich, 2012.
|
| 2011
|
| [] |  | Autonomous Camera-Based Navigation of a Quadrocopter (J. Engel), Master's thesis, Technical University Munich, 2011.
Distinguished with the SIEMENS award for best Master's Thesis 2012 |



