RGB-D SLAM Dataset and Benchmark
Contact: Jürgen Sturm
We provide a large dataset containing RGB-D data and ground-truth data with the goal to establish a novel benchmark for the evaluation of visual odometry and visual SLAM systems. Our dataset contains the color and depth images of a Microsoft Kinect sensor along the ground-truth trajectory of the sensor. The data was recorded at full frame rate (30 Hz) and sensor resolution (640x480). The ground-truth trajectory was obtained from a high-accuracy motion-capture system with eight high-speed tracking cameras (100 Hz). Further, we provide the accelerometer data from the Kinect. Finally, we propose an evaluation criterion for measuring the quality of the estimated camera trajectory of visual SLAM systems.




How can I use the RGB-D Benchmark to evaluate my SLAM system?
- Run your favorite visual odometry/visual SLAM algorithm (for example, RGB-D SLAM)
- Save the estimated camera trajectory to a file (file formats, example trajectory)
- Evaluate your algorithm by comparing the estimated trajectory with the ground truth trajectory. We provide an automated evaluation tool to help you with the evaluation. There is also an online version of the tool.
Further remarks
- Jose Luis Blanco has added our dataset to the mobile robot programming toolkit (MRPT) repository. The dataset (including example code and tools) can be downloaded here.
- If you wish to publish your trajectories on our website (for example to allow others to directly compare with your results), please contact us.
- As soon as enough methods have been evaluated, we plan to publish a joint evaluation paper. Contact us if you are interested in this.
- If you have any questions about the dataset/benchmark/evaluation/file formats, please don't hesitate to contact Jürgen Sturm.
- We are happy to share our data with other researchers. Please refer to the respective publication when using this data.
@InProceedings{ sturm12iros,
author = {J. Sturm and N. Engelhard and F. Endres and W. Burgard and D. Cremers},
title = "A Benchmark for the Evaluation of RGB-D SLAM Systems",
booktitle = "Proc. of the International Conference on Intelligent Robot Systems (IROS)",
year = "2012",
month= "Oct.",
}
License
Unless stated otherwise, all data in the TUM RGB-D benchmark is licensed under a Creative Commons 4.0 Attribution License (CC BY 4.0) and the accompanying source code is licensed under a BSD-2-Clause License.
Related publications
Export as PDF, XML, TEX or BIB
Conference and Workshop Papers
2026
[] 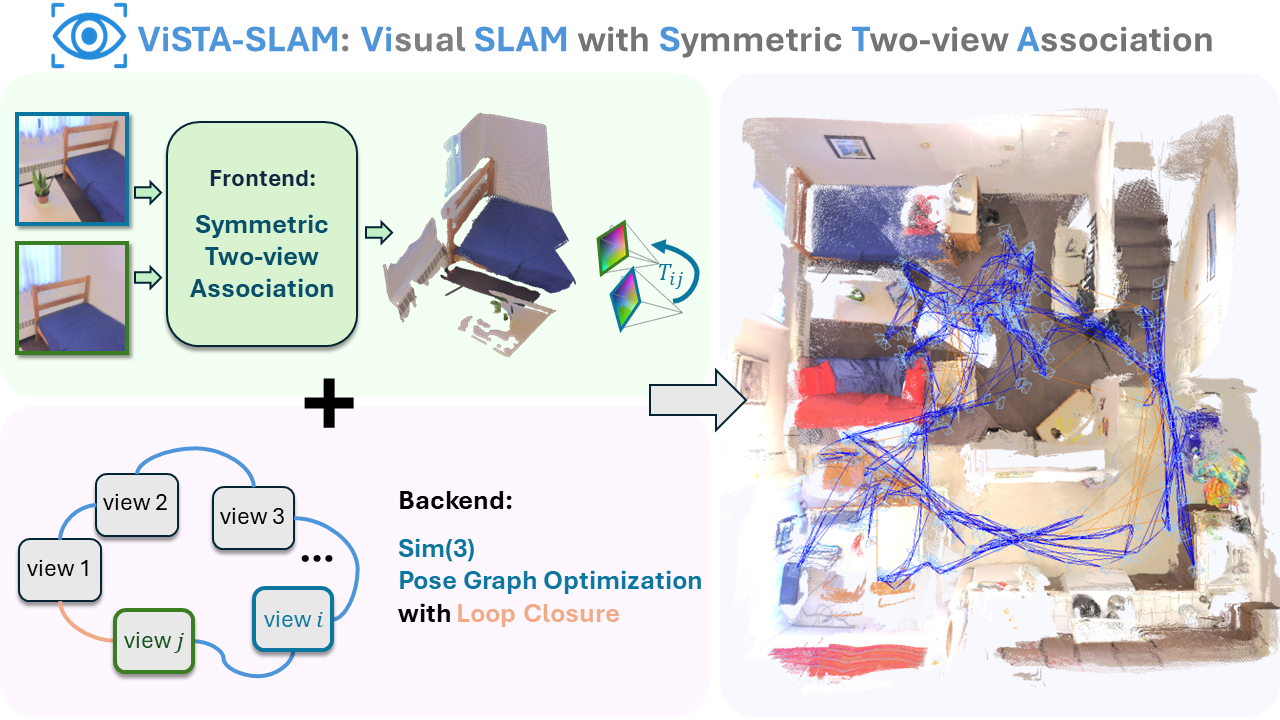
ViSTA-SLAM: Visual SLAM with Symmetric Two-view Association , In 3DV, 2026. ([project page] [code])
2025
[] 
The Monado SLAM Dataset for Egocentric Visual-Inertial Tracking , In International Conference on Intelligent Robots and Systems (IROS), 2025. ([project page])
2017
[] 
Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction , In British Machine Vision Conference (BMVC), 2017. ([poster] [supplementary])
2014
[] 
Submap-based Bundle Adjustment for 3D Reconstruction from RGB-D Data , In German Conference on Pattern Recognition (GCPR), 2014. ([slides])
Oral Presentation
2013
[] CopyMe3D: Scanning and Printing Persons in 3D , In German Conference on Pattern Recognition (GCPR), 2013.
[] 
Dense Tracking and Mapping with a Quadrocopter , In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
[] 
Dense Visual SLAM for RGB-D Cameras , In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013.
[] 
Direct Camera Pose Tracking and Mapping With Signed Distance Functions , In Demo Track of the RGB-D Workshop on Advanced Reasoning with Depth Cameras at the Robotics: Science and Systems Conference (RSS), 2013.
[] 
Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance Functions , In Robotics: Science and Systems Conference (RSS), 2013.
[] 
Robust Odometry Estimation for RGB-D Cameras , In International Conference on Robotics and Automation (ICRA), 2013.
Best Vision Paper Award - Finalist
2012
[] 
Evaluating Egomotion and Structure-from-Motion Approaches Using the TUM RGB-D Benchmark , In Proc. of the Workshop on Color-Depth Camera Fusion in Robotics at the IEEE/RJS International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
A Benchmark for the Evaluation of RGB-D SLAM Systems , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
An Evaluation of the RGB-D SLAM System , In International Conference on Robotics and Automation (ICRA), 2012.
2011
[] 
Real-Time Visual Odometry from Dense RGB-D Images , In Workshop on Live Dense Reconstruction with Moving Cameras at the Intl. Conf. on Computer Vision (ICCV), 2011.
[] 
Towards a benchmark for RGB-D SLAM evaluation , In Proc. of the RGB-D Workshop on Advanced Reasoning with Depth Cameras at Robotics: Science and Systems Conf. (RSS), 2011.
[] 
Real-time 3D visual SLAM with a hand-held camera , In Proc. of the RGB-D Workshop on 3D Perception in Robotics at the European Robotics Forum, 2011.
Other Publications
2013
[] 
Out-of-Core Bundle Adjustment for 3D Workpiece Reconstruction , Master's thesis, Technische Universität München, 2013.
2012
[] 
Odometry from RGB-D Cameras for Autonomous Quadrocopters , Master's thesis, Technical University Munich, 2012.


