This is an old revision of the document!

Visiting Professor
Technical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Tel: +49-(0)89-289-17792
Fax: +49-89-289-17757
Mail:
News
As of April 1st, 2018, I am a Max Planck Research Group leader at the MPI for Intelligent Systems in Tübingen. My new email adress is joerg.stueckler@tuebingen.mpg.de. My new website will be here.
Publications
Export as PDF, XML, TEX or BIB
Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis
Book Chapters
2015
[] Perception of Deformable Objects and Compliant Manipulation for Service Robots , Chapter in Soft Robotics: From Theory to Applications (A. ASO. BA. R A. Verl, ed.), Springer, 2015. (to appear)
2014
[] Active Recognition and Manipulation for Mobile Robot Bin Picking , Chapter in Gearing Up and Accelerating Cross‐fertilization between Academic and Industrial Robotics Research in Europe: Technology Transfer Experiments from the ECHORD Project, Springer, 2014.
[] Increasing Flexibility of Mobile Manipulation and Intuitive Human-Robot Interaction in RoboCup@Home , Chapter in RoboCup 2013, Robot Soccer World Cup XVII, Springer, 2014.
2013
[] NimbRo@Home: Winning Team of the RoboCup@Home Competition 2012 , Chapter in RoboCup 2012, Robot Soccer World Cup XVI, Springer, 2013.
2012
[] Towards Robust Mobility, Flexible Object Manipulation, and Intuitive Multimodal Interaction for Domestic Service Robots , Chapter in RoboCup 2011, Robot Soccer World Cup XV, Springer, 2012.
Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis
Journal Articles
2020
[] 
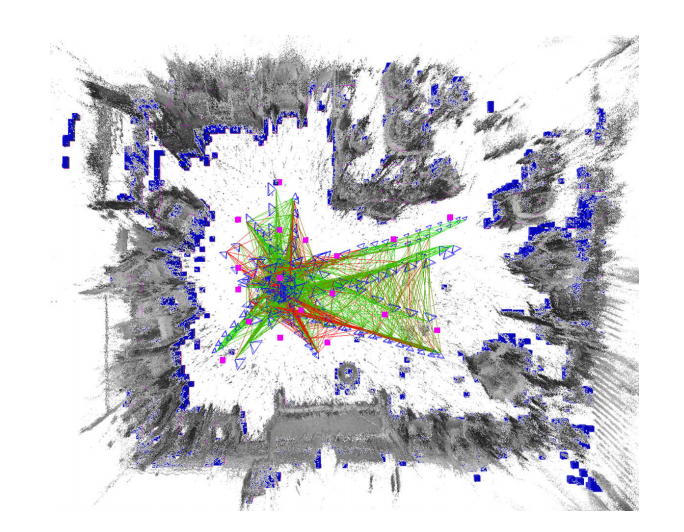
Visual-Inertial Mapping with Non-Linear Factor Recovery , In IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robotics and Automation (ICRA), IEEE, volume 5, 2020. ([arxiv])
2018
[] 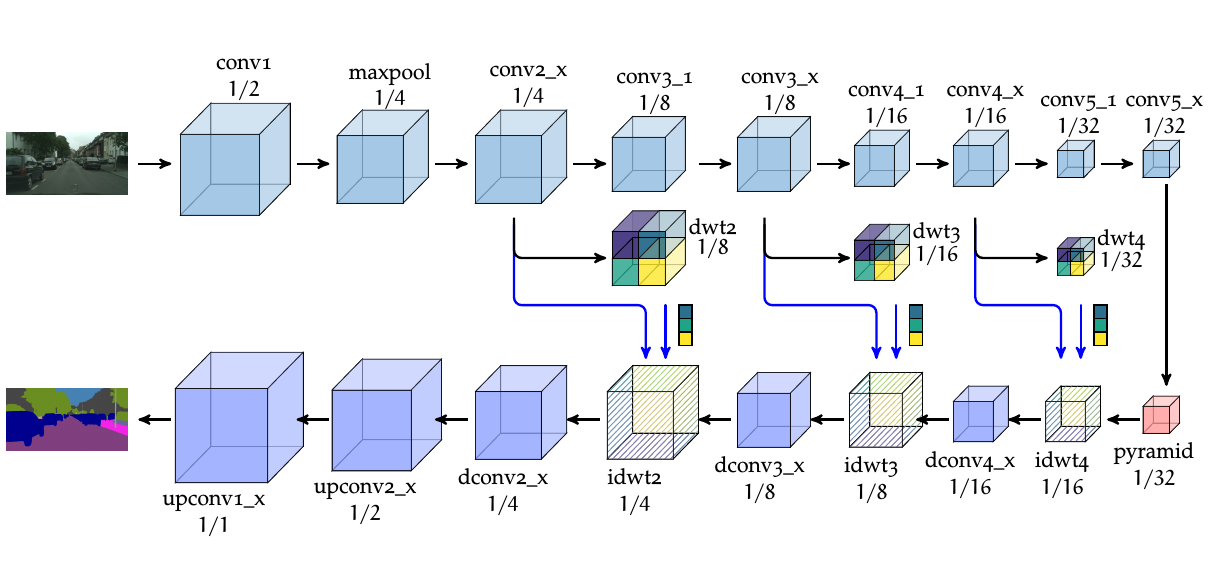
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform , In , 2018. ([arxiv])
[] 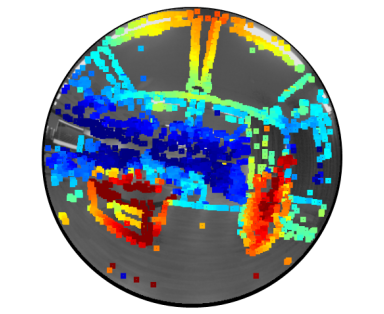
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras , In IEEE Robotics and Automation Letters & Int. Conference on Intelligent Robots and Systems (IROS), IEEE, 2018. ([arxiv])
2015
[] Multi-Layered Mapping and Navigation for Autonomous Micro Aerial Vehicles , In Journal of Field Robotics, 2015. (to appear)
[] NimbRo Explorer: Semi-Autonomous Exploration and Mobile Manipulation in Rough Terrain , In Journal of Field Robotics, 2015. (to appear)
[] Efficient Dense Rigid-Body Motion Segmentation and Estimation in RGB-D Video , In International Journal of Computer Vision, Springer US, 2015.
2014
[] Multi-Resolution Surfel Maps for Efficient Dense 3D Modeling and Tracking , In Journal of Visual Communication and Image Representation, volume 25, 2014.
[] Dense Real-Time Mapping of Object-Class Semantics from RGB-D Video , In Journal of Real-Time Image Processing, Springer, 2014.
[] Rough Terrain Mapping and Navigation using a Continuously Rotating 2D Laser Scanner , In Künstliche Intelligenz, Springer, volume 28, 2014.
2012
[] RoboCup@Home: Demonstrating Everyday Manipulation Skills in RoboCup@Home , In IEEE Robotics and Automation Magazine, volume 19, 2012.
[] Efficient 3D Object Perception and Grasp Planning for Mobile Manipulation in Domestic Environments , In Robotics and Autonomous Systems, volume 61, 2012.
2008
[] Hierarchical Reactive Control for Humanoid Soccer Robots , In International Journal of Humanoid Robots, volume 5, 2008.
Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis
Conference and Workshop Papers
2020
[] 
DirectShape: Photometric Alignment of Shape Priors for Visual Vehicle Pose and Shape Estimation , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2020. ([video][presentation][project page][supplementary][arxiv])
2018
[] 
Direct Sparse Odometry With Rolling Shutter , In European Conference on Computer Vision (ECCV), 2018. ([supplementary][arxiv])
Oral Presentation [] 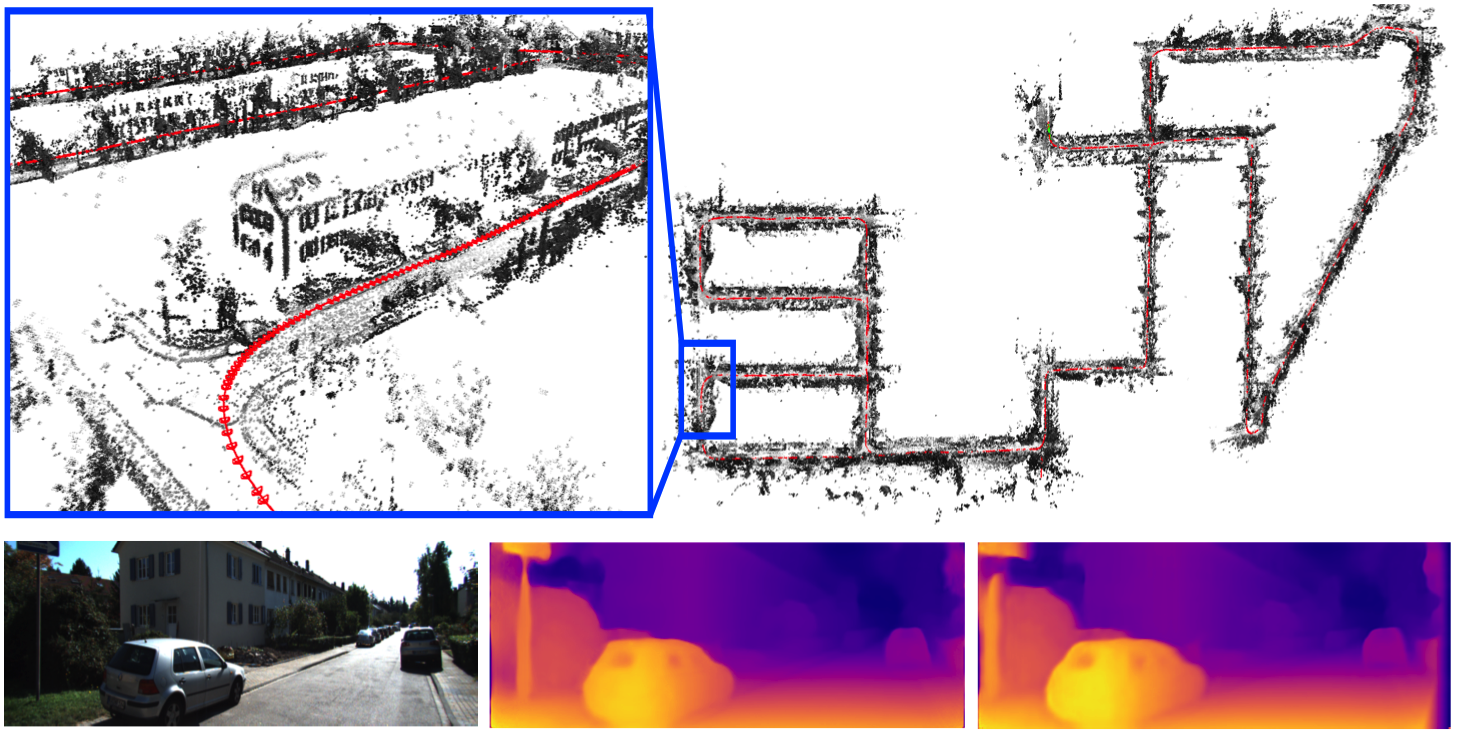
Deep Virtual Stereo Odometry: Leveraging Deep Depth Prediction for Monocular Direct Sparse Odometry , In European Conference on Computer Vision (ECCV), 2018. ([arxiv],[supplementary],[project])
Oral Presentation [] 
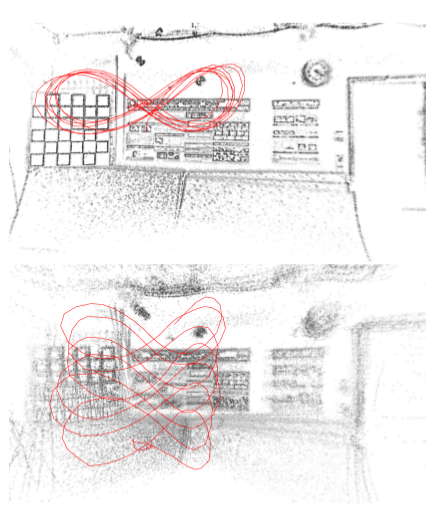
The TUM VI Benchmark for Evaluating Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv])
2017
[] SAMP: Shape and Motion Priors for 4D Vehicle Reconstruction , In IEEE Winter Conference on Applications of Computer Vision, WACV, 2017.
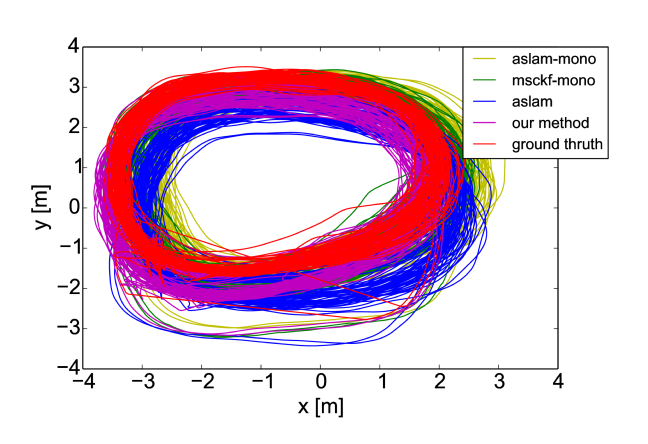
[] Keyframe-Based Visual-Inertial Online SLAM with Relocalization , In IEEE/RSJ Int. Conference on Intelligent Robots and Systems, IROS, 2017.
[] Semi-Supervised Deep Learning for Monocular Depth Map Prediction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017.
[] 
From Monocular SLAM to Autonomous Drone Exploration , In European Conference on Mobile Robots (ECMR), 2017. ([arXiv])
[] 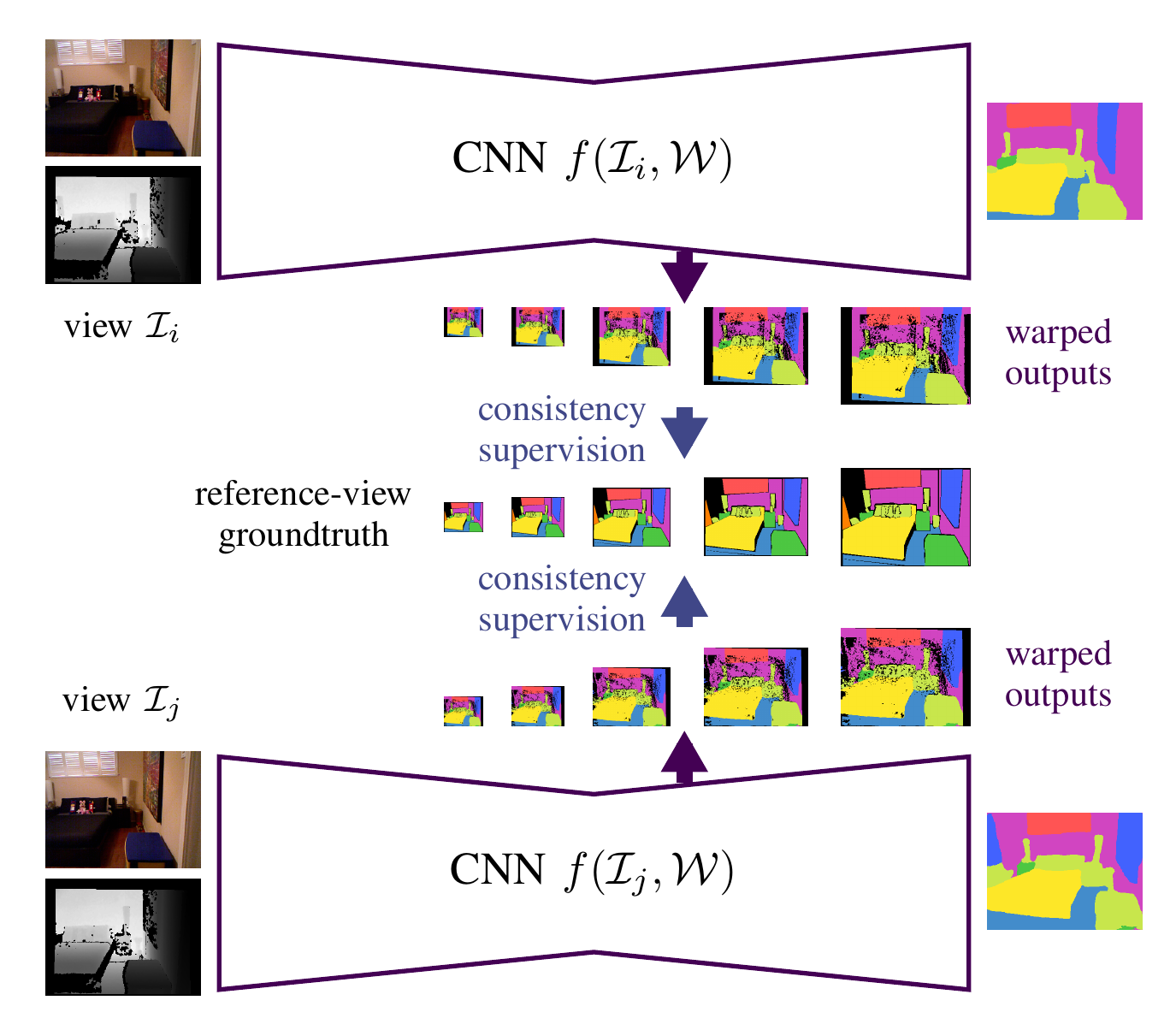
Multi-View Deep Learning for Consistent Semantic Mapping with RGB-D Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2017.
2016
[] Joint Object Pose Estimation and Shape Reconstruction in Urban Street Scenes Using 3D Shape Priors , In Proc. of the German Conference on Pattern Recognition (GCPR), 2016.
[] Scene Flow Propagation for Semantic Mapping and Object Discovery in Dynamic Street Scenes , In IEEE/RSJ Int. Conference on Intelligent Robots and Systems, IROS, 2016.
[] Unsupervised Learning of Shape-Motion Patterns for Objects in Urban Street Scenes , In British Machine Vision Conference (BMVC), 2016.
[] 
CPA-SLAM: Consistent Plane-Model Alignment for Direct RGB-D SLAM , In International Conference on Robotics and Automation (ICRA), 2016.
[] 
Direct Visual-Inertial Odometry with Stereo Cameras , In International Conference on Robotics and Automation (ICRA), 2016.
2015
[] 
Dense Continuous-Time Tracking and Mapping with Rolling Shutter RGB-D Cameras , In IEEE International Conference on Computer Vision (ICCV), 2015. ([video][supplementary][datasets])
[] 
Motion Cooperation: Smooth Piece-Wise Rigid Scene Flow from RGB-D Images , In Proc. of the Int. Conference on 3D Vision (3DV), 2015. ([video])
[] 
Reconstructing Street-Scenes in Real-Time From a Driving Car , In Proc. of the Int. Conference on 3D Vision (3DV), 2015.
[] 
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures , In International Conference on 3D Vision (3DV), 2015. ([slides] [poster])
[] 
Large-Scale Direct SLAM with Stereo Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2015.
[] Real-Time Object Detection, Localization and Verification for Fast Robotic Depalletizing , In International Conference on Intelligent Robots and Systems (IROS), 2015.
2014
[] Mobile Teleoperation Interfaces with Adjustable Autonomy for Personal Service Robots , In Proceedings of the 2014 ACM/IEEE International Conference on Human-robot Interaction, Advances in Computational Mathematics, 2014.
[] Local multi-resolution representation for 6D motion estimation and mapping with a continuously rotating 3D laser scanner , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2014.
[] Efficient deformable registration of multi-resolution surfel maps for object manipulation skill transfer , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2014.
[] Combining the Strengths of Sparse Interest Point and Dense Image Registration for RGB-D Odometry , In Proc. of the Joint 45th International Symposium on Robotics (ISR) and 8th German Conference on Robotics (ROBOTIK), 2014.
[] Local Multi-Resolution Surfel Grids for MAV Motion Estimation and 3D Mapping , In Proc. of the 13th International Conference on Intelligent Autonomous Systems (IAS), 2014.
[] Adaptive Tool-Use Strategies for Anthropomorphic Service Robots , In Proc. of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2014.
2013
[] Mobile bin picking with an anthropomorphic service robot , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2013.
[] Hierarchical Object Discovery and Dense Modelling From Motion Cues in RGB-D Video , In Proc. of the 23rd International Joint Conference on Artificial Intelligence (IJCAI), IJCAI/AAAI, 2013.
[] Combining contour and shape primitives for object detection and pose estimation of prefabricated parts , In Proc. of the 20th IEEE International Conference on Image Processing (ICIP), 2013.
[] Distinctive 3D surface entropy features for place recognition. , In Proc. of the European Conference on Mobile Robots (ECMR), IEEE, 2013.
[] Joint detection and pose tracking of multi-resolution surfel models in RGB-D , In Proc. of the European Conference on Mobile Robots (ECMR), IEEE, 2013.
[] Efficient Dense 3D Rigid-Body Motion Segmentation in RGB-D Video , In Proc. of the British Machine Vision Conference (BMVC), 2013.
[] Multi-resolution surfel mapping and real-time pose tracking using a continuously rotating 2D laser scanner , In Proc. of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2013.
2012
[] Robust Real-Time Registration of RGB-D Images using Multi-Resolution Surfel Representations , In Proc. of ROBOTIK, VDE-Verlag, 2012.
[] Efficient Mobile Robot Navigation using 3D Surfel Grid Maps , In Proc. of ROBOTIK, VDE-Verlag, 2012.
[] Shape-Primitive Based Object Recognition and Grasping , In Proc. of ROBOTIK, VDE-Verlag, 2012.
[] Model Learning and Real-Time Tracking Using Multi-Resolution Surfel Maps , In , 2012.
[] Adaptive Multi-cue 3D Tracking of Arbitrary Objects , In DAGM/OAGM Symposium (A Pinz, T Pock, H Bischof, F Leberl, eds.), Springer, volume 7476, 2012.
[] SURE: Surface Entropy for Distinctive 3D Features , In Proc. of Spatial Cognition, 2012.
[] Adjustable autonomy for mobile teleoperation of personal service robots , In Proc. of the IEEE Int. Symp. on Robot and Human Interactive Communication, 2012.
[] Integrating depth and color cues for dense multi-resolution scene mapping using RGB-D cameras , In Proc. of the IEEE Int. Conf. on Multisensor Fusion and Integration for Intelligent Systems (MFI), 2012.
[] Semantic mapping using object-class segmentation of RGB-D images , In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2012.
[] Bayesian calibration of the hand-eye kinematics of an anthropomorphic robot , In Proc. of the 12th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2012.
2011
[] Learning to Interpret Pointing Gestures with a Time-of-flight Camera , In Proceedings of the 6th International Conference on Human-robot Interaction, Advances in Computational Mathematics, 2011.
[] Interest point detection in depth images through scale-space surface analysis , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
[] Towards joint attention for a domestic service robot - person awareness and gesture recognition using Time-of-Flight cameras , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
[] Compliant Task-Space Control with Back-Drivable Servo Actuators , In RoboCup (T Röfer, NM Mayer, J Savage, U Saranli, eds.), Springer, volume 7416, 2011.
[] Real-Time 3D Perception and Efficient Grasp Planning for Everyday Manipulation Tasks. , In Proc. of the European Conf. on Mobile Robots (ECMR), 2011.
[] Following human guidance to cooperatively carry a large object , In Proc. of the 11th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2011.
[] Efficient Multi-resolution Plane Segmentation of 3D Point Clouds , In Proc. of the Int. Conf. on Intelligent Robotics and Applications (ICIRA) (S Jeschke, H Liu, D Schilberg, eds.), Springer Berlin Heidelberg, volume 7102, 2011.
2010
[] Using Time-of-Flight cameras with active gaze control for 3D collision avoidance , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2010.
[] Improving indoor navigation of autonomous robots by an explicit representation of doors , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2010.
[] Intuitive Multimodal Interaction for Domestic Service Robots , In Proc. of the ISR/ROBOTIK, VDE Verlag, 2010.
[] Learning Motion Skills from Expert Demonstrations and Own Experience using Gaussian Process Regression , In Proc. of the ISR/ROBOTIK, VDE Verlag, 2010.
[] Utilizing the Structure of Field Lines for Efficient Soccer Robot Localization , In RobuCup (JR del Solar, E Chown, PG Plöger, eds.), Springer, volume 6556, 2010.
[] Towards Semantic Scene Analysis with Time-of-flight Cameras , In RobuCup (JR del Solar, E Chown, PG Plöger, eds.), Springer, volume 6556, 2010.
[] Improving People Awareness of Service Robots by Semantic Scene Knowledge , In RobuCup (JR del Solar, E Chown, PG Plöger, eds.), Springer, volume 6556, 2010.
[] Combining depth and color cues for scale- and viewpoint-invariant object segmentation and recognition using Random Forests , In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2010.
[] Improving imitated grasping motions through interactive expected deviation learning , In Proc. of the 10th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2010.
2009
[] Dynamaid, an Anthropomorphic Robot for Research on Domestic Service Applications , In Proc. of the European Conference on Mobile Robots (ECMR), 2009.
[] Integrating indoor mobility, object manipulation, and intuitive interaction for domestic service tasks , In Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2009.
2008
[] Orthogonal wall correction for visual motion estimation , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2008.
[] In-lane Localization in Road Networks using Curbs Detected in Omnidirectional Height Images , In Proceedings of Robotik 2008, 2008.
2007
[] Hierarchical reactive control for a team of humanoid soccer robots , In Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2007.
2006
[] See, walk, and kick: Humanoid robots start to play soccer , In Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2006.
Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis
PhD Thesis
2014
[] Efficient Dense Registration, Segmentation, and Modeling Methods for RGB-D Environment Perception , PhD thesis, Faculty of Mathematics and Natural Sciences, University of Bonn, Germany, 2014.


