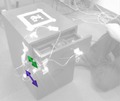
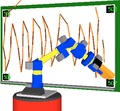
Body Schema Learning
Kinematic models are widely used in robotics to describe the mechanism of a robot. For example, the kinematic model of a manipulation robot is typically specified by the position of its joints, and the size and orientation of its links. Kinematic models are usually derived analytically by a robot engineer and thus rely heavily on prior knowledge about the geometry of the robot. When such a model is applied to a real robot, its parameters have to be carefully calibrated to ensure a high accuracy, for example, using expensive calibration systems at the robot manufacturer's site. As robotic systems become more versatile and are increasingly delivered in completely reconfigurable ways, there is a growing demand for techniques to learn kinematic models automatically. Ideally, such techniques would neither require human intervention nor costly calibration equipment. This capability does not only facilitate the deployment and calibration of new robotic systems but also enables robots to autonomously adapt their models when the kinematics change, for example, as a result of hardware failures or material fatigue. Furthermore, the intelligent use of tools also requires the robot to include a tool dynamically in its kinematic model.
Related Publications
Export as PDF, XML, TEX or BIB
Books | Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications
Books
2013
[] 
Approaches to Probabilistic Model Learning for Mobile Manipulation Robots , Springer, 2013.
Books | Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications
Book Chapters
2012
[] 
Body Schema Learning , Chapter in Towards Service Robots for Everyday Environments, Springer Berlin/Heidelberg, 2012.
Books | Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications
Journal Articles
2014
[] 
Scale-Aware Navigation of a Low-Cost Quadrocopter with a Monocular Camera , In Robotics and Autonomous Systems (RAS), volume 62, 2014.
2013
[] 
Introduction to the special issue on visual understanding and applications with RGB-D cameras , In Journal of Visual Communication and Image Representation (JVCI), 2013.
[] 
3D Mapping with an RGB-D Camera , In IEEE Transactions on Robotics (T-RO), volume 30, 2013.
2012
[] 
Online-6D-SLAM für RGB-D-Sensoren , In at - Automatisierungstechnik, volume 60, 2012.
2011
[] 
A Probabilistic Framework for Learning Kinematic Models of Articulated Objects , In Journal on Artificial Intelligence Research (JAIR), volume 41, 2011.
[] 
Tactile Sensing for Mobile Manipulation , In IEEE Transactions on Robotics (T-RO), 2011.
2009
[] 
An appearance-based visual compass for mobile robots , In Robotics and Autonomous Systems, volume 57, 2009.
[] 
Body schema learning for robotic manipulators from visual self-perception , In Journal of Physiology-Paris, volume 103, 2009. (Neurorobotics)
Books | Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications
Conference and Workshop Papers
2017
[] 
De-noising, Stabilizing and Completing 3D Reconstructions On-the-go using Plane Priors , In International Conference on Robotics and Automation (ICRA), 2017. ([video])
2014
[] 
Towards Illumination-invariant 3D Reconstruction using ToF RGB-D Cameras , In International Conference on 3D Vision (3DV), 2014. ([supplementary])
[] 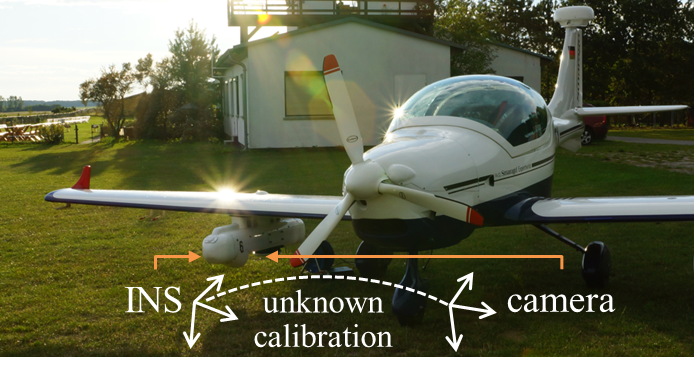
INS-Camera Calibration without Ground Control Points , In 9th IEEE ISIF Workshop on Sensor Data Fusion: Trends, Solutions, Applications (SDF), 2014.
[] 
Visual-Inertial Navigation for a Camera-Equipped 25g Nano-Quadrotor , In IROS2014 Aerial Open Source Robotics Workshop, 2014.
[] 
Submap-based Bundle Adjustment for 3D Reconstruction from RGB-D Data , In German Conference on Pattern Recognition (GCPR), 2014. ([slides])
Oral Presentation [] 
Collision Avoidance for Quadrotors with a Monocular Camera , In Proc. of The 12th International Symposium on Experimental Robotics (ISER), 2014.
[] 
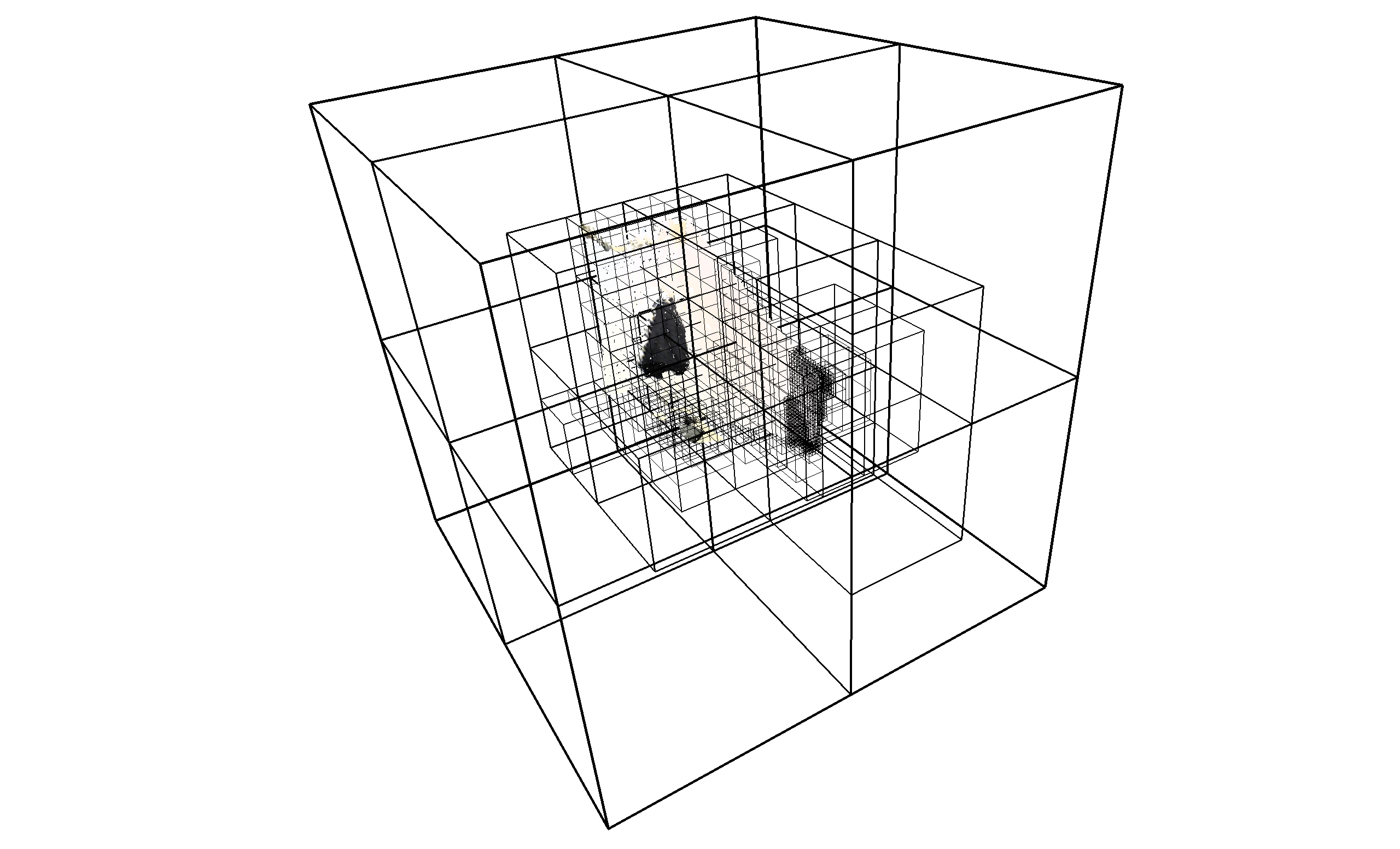
Volumetric 3D Mapping in Real-Time on a CPU , In International Conference on Robotics and Automation (ICRA), 2014.
2013
[] 
Interactive Person Following and Gesture Recognition with a Flying Robot , In Proc. of the Assistance and Service Robotics Workshop (ASROB) at the IEEE. Int. Conf. on Intelligent Robots and Systems (IROS), 2013.
[] 
Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences , In IEEE International Conference on Computer Vision (ICCV), 2013.
[] 
Semi-Dense Visual Odometry for a Monocular Camera , In IEEE International Conference on Computer Vision (ICCV), 2013.
[] CopyMe3D: Scanning and Printing Persons in 3D , In German Conference on Pattern Recognition (GCPR), 2013.
[] 
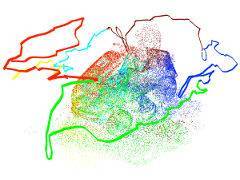
Graph-based bundle adjustment for INS-camera calibration , In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
Best research paper award [] 
Dense Tracking and Mapping with a Quadrocopter , In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
[] 
Scale-Aware Object Tracking with Convex Shape Constraints on RGB-D Images , In German Conference on Pattern Recognition (GCPR), 2013.
[] 
FollowMe: Person Following and Gesture Recognition with a Quadrocopter , In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013.
[] 
Dense Visual SLAM for RGB-D Cameras , In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013.
[] 
Learning Probabilistic Models for Mobile Manipulation Robots , In Proc. of the International Joint Conference on Artificial Intelligence (IJCAI), Track on Best papers in Sister Conferences, 2013.
[] 
Direct Camera Pose Tracking and Mapping With Signed Distance Functions , In Demo Track of the RGB-D Workshop on Advanced Reasoning with Depth Cameras at the Robotics: Science and Systems Conference (RSS), 2013.
[] 
Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance Functions , In Robotics: Science and Systems Conference (RSS), 2013.
[] 
Robust Odometry Estimation for RGB-D Cameras , In International Conference on Robotics and Automation (ICRA), 2013.
Best Vision Paper Award - Finalist
2012
[] 
Evaluating Egomotion and Structure-from-Motion Approaches Using the TUM RGB-D Benchmark , In Proc. of the Workshop on Color-Depth Camera Fusion in Robotics at the IEEE/RJS International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing , In Proc. of the Workshop on Visual Control of Mobile Robots (ViCoMoR) at the IEEE/RJS International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
A Benchmark for the Evaluation of RGB-D SLAM Systems , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
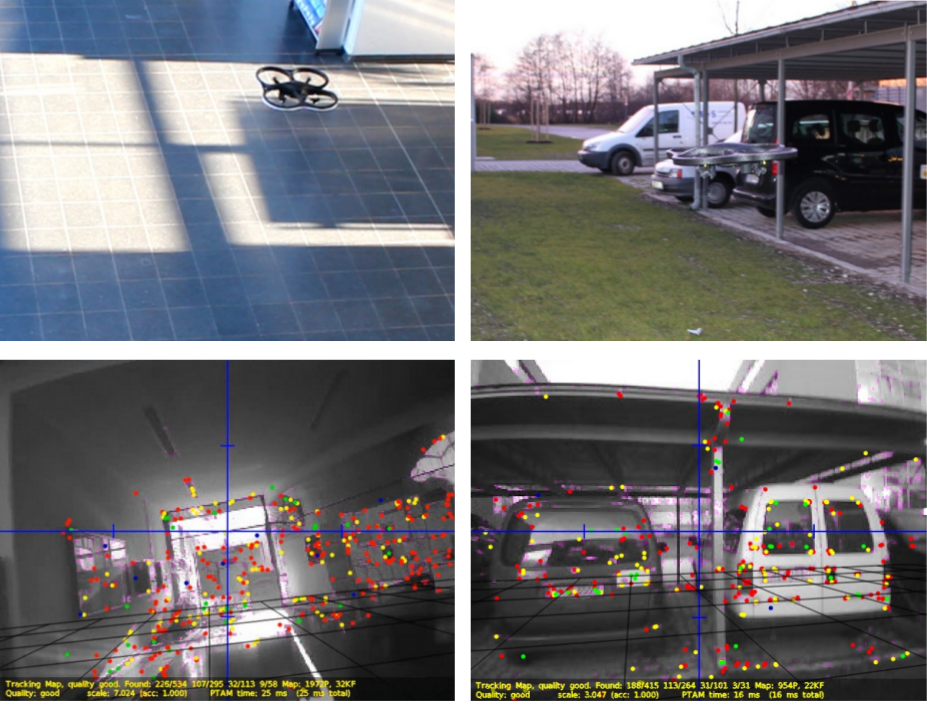
Camera-Based Navigation of a Low-Cost Quadrocopter , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
Real-Time Human Motion Tracking using Multiple Depth Cameras , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
A Generalized Framework for Opening Doors and Drawers in Kitchen Environments , In International Conference on Robotics and Automation (ICRA), 2012.
[] 
An Evaluation of the RGB-D SLAM System , In International Conference on Robotics and Automation (ICRA), 2012.
2011
[] 
Mobile Manipulation of Kitchen Containers , In Proc. of the IROS'11 Workshop on Results, Challenges and Lessons Learned in Advancing Robots with a Common Platform, 2011.
[] 
Real-Time Visual Odometry from Dense RGB-D Images , In Workshop on Live Dense Reconstruction with Moving Cameras at the Intl. Conf. on Computer Vision (ICCV), 2011.
[] 
Towards a benchmark for RGB-D SLAM evaluation , In Proc. of the RGB-D Workshop on Advanced Reasoning with Depth Cameras at Robotics: Science and Systems Conf. (RSS), 2011.
[] 
Real-time 3D visual SLAM with a hand-held camera , In Proc. of the RGB-D Workshop on 3D Perception in Robotics at the European Robotics Forum, 2011.
[] 
Learning the State Transition Model to Efficiently Clean Surfaces with Mobile Manipulation Robots , In Proc. of the Workshop on Manipulation under Uncertainty at the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
2010
[] 
Operating Articulated Objects Based on Experience , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2010.
[] 
Tactile Object Class and Internal State Recognition for Mobile Manipulation , In International Conference on Robotics and Automation (ICRA), 2010.
[] 
Vision-based Detection for Learning Articulation Models of Cabinet Doors and Drawers in Household Environments , In International Conference on Robotics and Automation (ICRA), 2010.
[] 
3D Pose Estimation, Tracking and Model Learning of Articulated Objects from Dense Depth Video using Projected Texture Stereo , In Proc. of the Workshop on Advanced Reasoning with Depth Cameras at the Robotics: Science and Systems Conference (RSS), 2010.
2009
[] 
Object Identification with Tactile Sensors Using Bag-of-Features , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2009.
[] 
Regression-Based Online Situation Recognition for Vehicular Traffic Scenarios , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2009.
[] 
Learning Kinematic Models for Articulated Objects , In Proc. of the International Joint Conference on Artificial Intelligence (IJCAI), 2009.
[] 
Towards Understanding Articulated Objects , In Proc. of the Workshop on Robot Manipulation at Robotics: Science and Systems Conference (RSS), 2009.
[] 
Learning Kinematics from Direct Self-Observation Using Nearest-Neighbor Methods , In Proc. of the German Workshop on Robotics, 2009.
[] 
Imitation Learning with Generalized Task Descriptions , In International Conference on Robotics and Automation (ICRA), 2009.
2008
[] 
Body Scheme Learning and Life-Long Adaptation for Robotic Manipulation , In Proc. of the Workshop on Robot Manipulation at the Robotics: Science and Systems Conference (RSS), 2008.
[] 
Adaptive Body Scheme Models for Robust Robotic Manipulation , In Robotics: Science and Systems Conference (RSS), 2008.
[] 
Unsupervised Body Scheme Learning through Self-Perception , In International Conference on Robotics and Automation (ICRA), 2008.
2006
[] 
Dutch AIBO Team at RoboCup 2006 , In Proceedings CD RoboCup 2006, Bremen, Germany, 2006.
[] 
Robot companion localization at home and in the office , In Proc. of the Belgian-Netherlands Artificial Intelligence Conference (BNAIC), 2006.
[] 
Panoramic Localization in the 4-Legged League , In Proc. of the RoboCup International Symposium (G. Lakemeyer, E. Sklar, D. Sorrenti, T. Takahashi, eds.), Springer, volume 4434, 2006.
[] 
Autonomous Color Learning in an Artificial Environment , In Proc. of the Belgian-Netherlands Artificial Intelligence Conference (BNAIC), 2006.
2005
[] 
Dutch AIBO Team at RoboCup 2005 , In Proceedings CD RoboCup 2005, Osaka, Japan, 2005.
Books | Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications
PhD Thesis
2011
[] 
Approaches to Probabilistic Model Learning for Mobile Manipulation Robots , PhD thesis, University of Freiburg, 2011.
Received the Artificial Intelligence Dissertation Award 2011 (ECCAI) and the Wolfgang-Genter-Award 2011 (University of Freiburg); Finalist at the Georges-Giralt-Award 2012 (EURON); Selected for the Best Paper Track at IJCAI 2013 Books | Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications
Technical Reports
2006
[] 
Dutch Aibo Team: Technical Report RoboCup 2006 , Technical report, Dutch Aibo Team, 2006.
2005
[] 
Dutch Aibo Team: Technical Report RoboCup 2005 , Technical report, Dutch Aibo Team, 2005.
Books | Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications
Other Publications
2013
[] 
Lecture Notes: Visual Navigation for Flying Robots , Technische Universität München, Germany, 2013.
Distinguished with the TUM TeachInf Award for the best lecture in summer term 2013
2012
[] 
Lecture Notes: Visual Navigation for Flying Robots , Technische Universität München, Germany, 2012.
Distinguished with the TUM TeachInf Award for the best lecture in summer term 2012
2006
[] 
An appearance-based Visual Compass for Mobile Robots , Master's thesis, University of Amsterdam, 2006.


