This is an old revision of the document!

Technical University of Munich
School of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Mail:
Find me on Google Scholar, Gitlab, Github, Linkedin.
Research Interests
Visual-Inertial Odometry
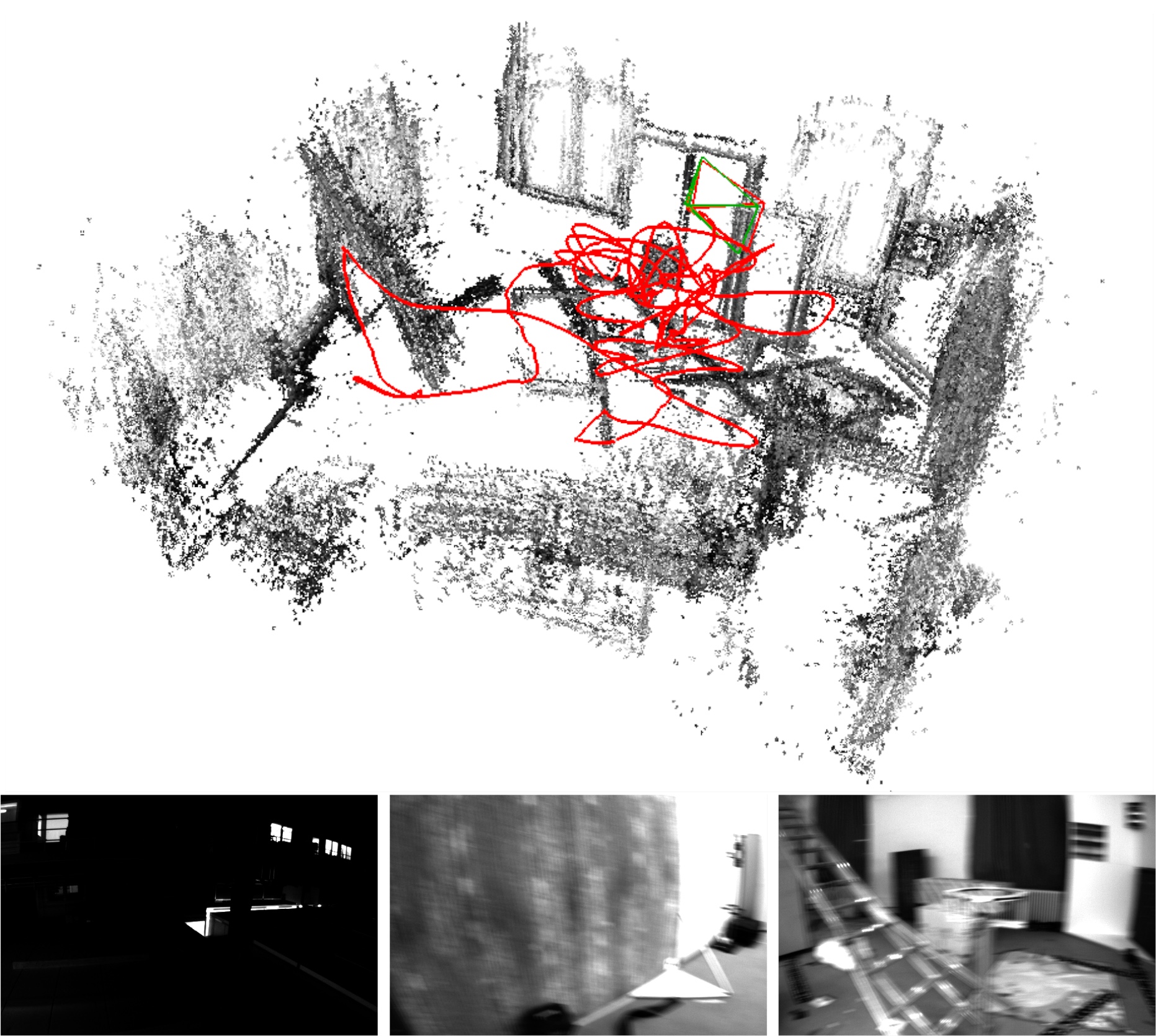
We've created the Visual-Inertial Dataset, a novel dataset with a diverse set of sequences in different scenes for evaluating Visual-Inertial odometry.
This video shows "Visual-Inertial Mapping with Non-Linear Factor Recovery".
This video shows "Direct Visual-Inertial Odometry with Stereo Cameras" presented at ICRA 2016
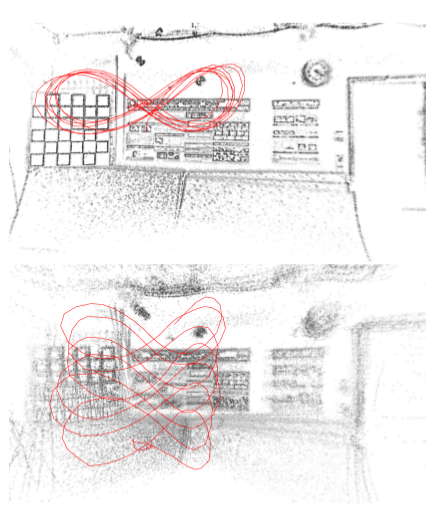
This video shows "Direct Sparse Visual-Inertial Odometry using Dynamic Marginalization" presented at ICRA 2018, based on the Master's thesis of Lukas von Stumberg that I supervised.
Visual Navigation for MAVs
- EuRoC Competition
- 2018-02-28: Our team TUM Flyers has presented the final Field-Test demonstration of the EuRoC Project.
- 2017-05-11: Our team TUM Flyers has been ranked 1st in Stage 2 and admitted to Stage 3 of the EuRoC Challenge 3. See this link for details.
- 2015-05-13: Our team TUM Flyers has been admitted to Stage 2 of the EuRoC Challenge 3 with the top scoring proposal! See this link for details.
- 2014-12-01: Our team TUM Flyers has won Stage 1 of the EuRoC Challenge 3 on Servicing and Inspection with MAVs in Industrial Use-Cases. See this link for details.
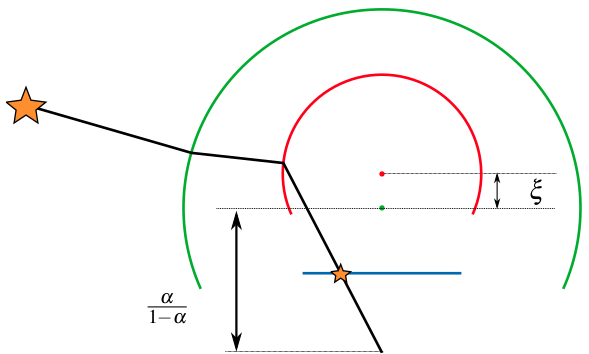
- Real-Time Trajectory Replanning for MAVs using Uniform B-splines and 3D Circular Buffer
More information about the project is here.
- Other Projects
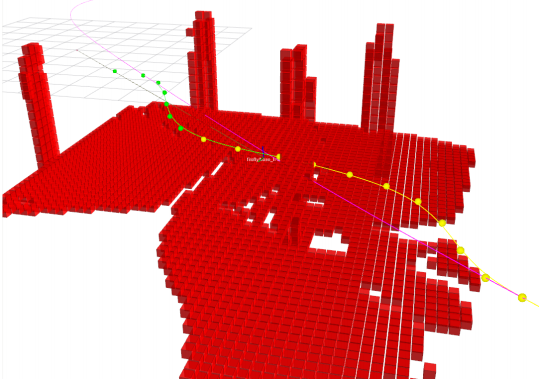
This video shows an Autonomous Exploration with a Low-Cost Quadrocopter using Semi-Dense Monocular SLAM. This is Bachelor's Thesis of Lukas von Stumberg, which I co-supervised:
Publications
Export as PDF, XML, TEX or BIB
Book Chapters
2020
[] 
TUM Flyers: Vision—Based MAV Navigation for Systematic Inspection of Structures , Chapter in Bringing Innovative Robotic Technologies from Research Labs to Industrial End-users (F. Caccavale, C. Ott, B. Winkler, Z. Taylor, eds.), Springer International Publishing, 2020.
2019
[] 
A Review and Quantitative Evaluation of Direct Visual–Inertial Odometry , Chapter in Multimodal Scene Understanding (M. Yang, B. Rosenhahn, V. Murino, eds.), Academic Press, 2019.
Journal Articles
2020
[] 
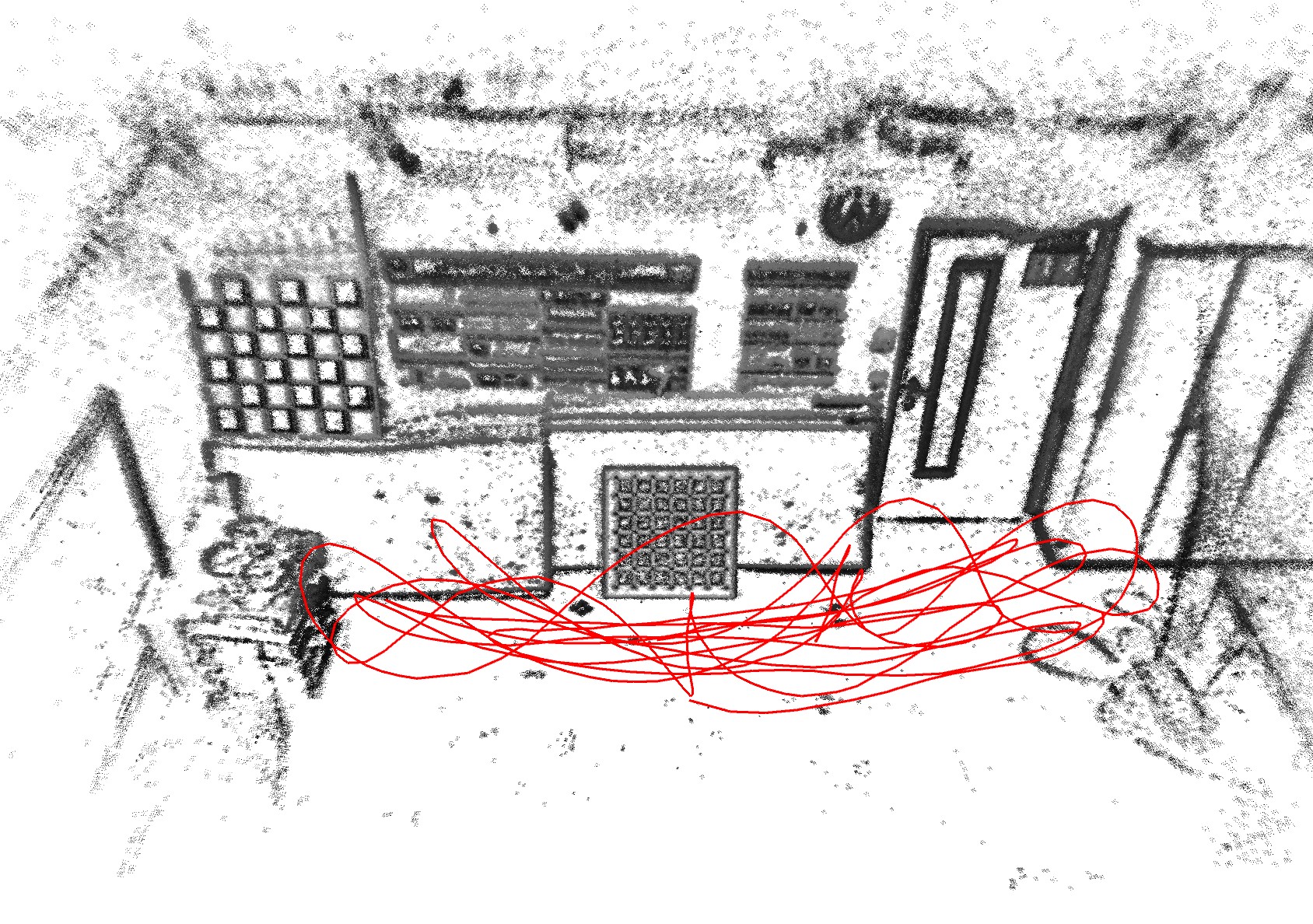
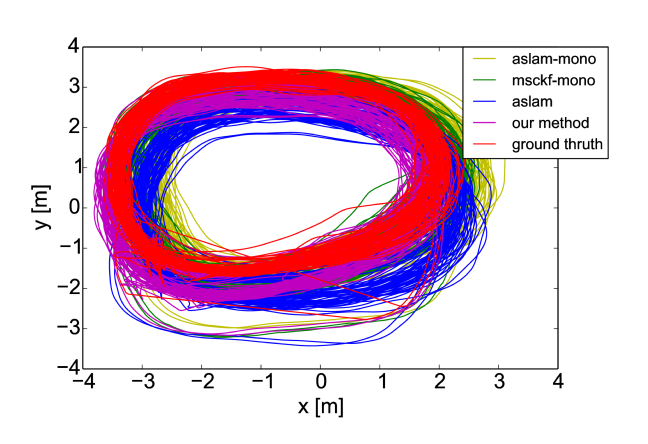
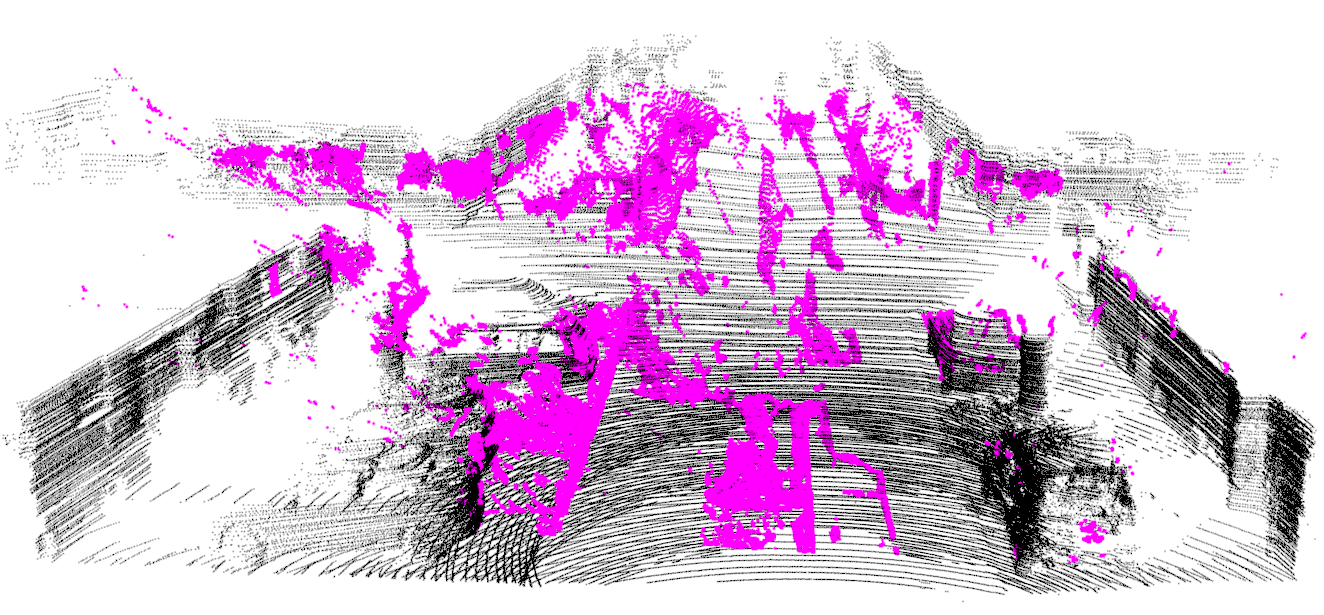
Visual-Inertial Mapping with Non-Linear Factor Recovery , In IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robotics and Automation (ICRA), IEEE, volume 5, 2020. ([arxiv])
2018
[] 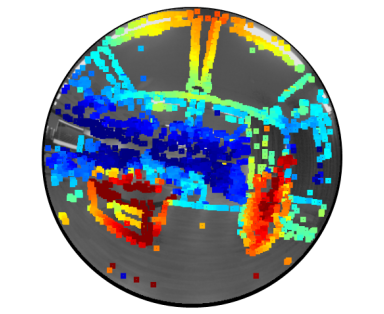
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras , In IEEE Robotics and Automation Letters & Int. Conference on Intelligent Robots and Systems (IROS), IEEE, 2018. ([arxiv])
2015
[] 
Cloud-based collaborative 3D mapping in real-time with low-cost robots , In IEEE Transactions on Automation Science and Engineering, IEEE, volume 12, 2015.
Conference and Workshop Papers
2021
[] 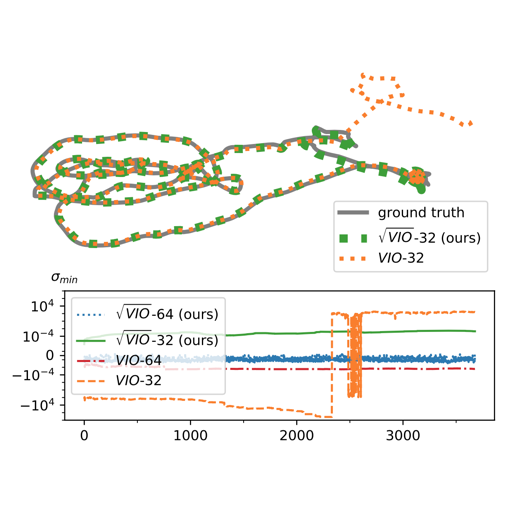
Square Root Marginalization for Sliding-Window Bundle Adjustment , In IEEE International Conference on Computer Vision (ICCV), 2021. ([project page])
[] 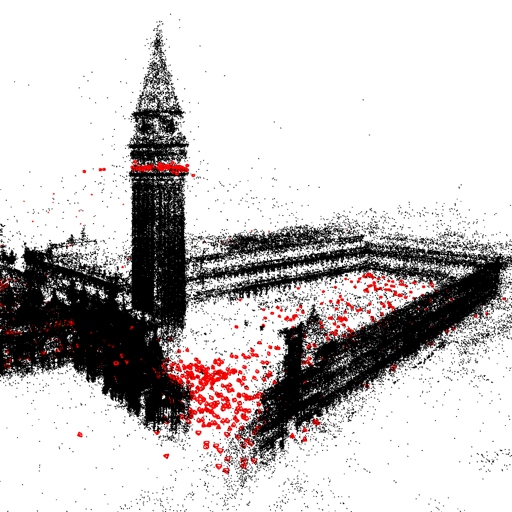
Square Root Bundle Adjustment for Large-Scale Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([project page])
2020
[] 
Efficient Derivative Computation for Cumulative B-Splines on Lie Groups , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation
2019
[] 
Rolling-Shutter Modelling for Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2019. ([arxiv])
2018
[] 
The Double Sphere Camera Model , In Proc. of the Int. Conference on 3D Vision (3DV), 2018. ([arxiv])
[] 
Direct Sparse Odometry With Rolling Shutter , In European Conference on Computer Vision (ECCV), 2018. ([supplementary][arxiv])
Oral Presentation [] 
The TUM VI Benchmark for Evaluating Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv])
[] 
Direct Sparse Visual-Inertial Odometry using Dynamic Marginalization , In International Conference on Robotics and Automation (ICRA), 2018. ([supplementary][video][arxiv])
2017
[] 
Real-Time Trajectory Replanning for MAVs using Uniform B-splines and a 3D Circular Buffer , In International Conference on Intelligent Robots and Systems (IROS), 2017. ([arxiv])
Best Paper Award - Finalist (link) [] 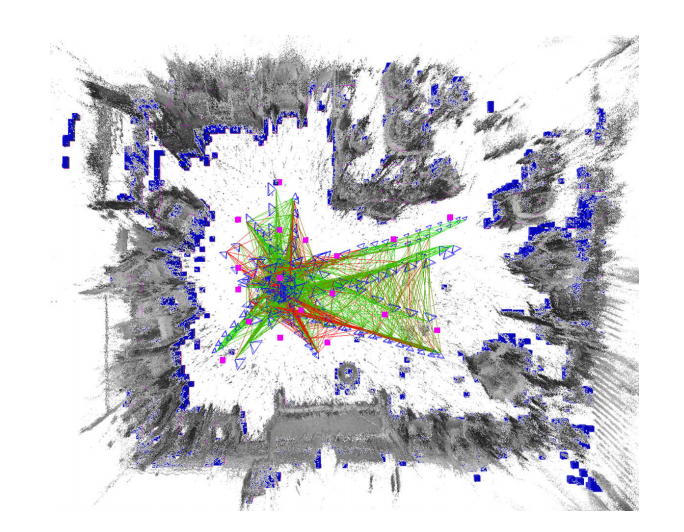
From Monocular SLAM to Autonomous Drone Exploration , In European Conference on Mobile Robots (ECMR), 2017. ([arXiv])
2016
[] 
A Photometrically Calibrated Benchmark For Monocular Visual Odometry , In arXiv:1607.02555, 2016.
[] 
Direct Visual-Inertial Odometry with Stereo Cameras , In International Conference on Robotics and Automation (ICRA), 2016.
2015
[] 
Reconstructing Street-Scenes in Real-Time From a Driving Car , In Proc. of the Int. Conference on 3D Vision (3DV), 2015.
2012
[] 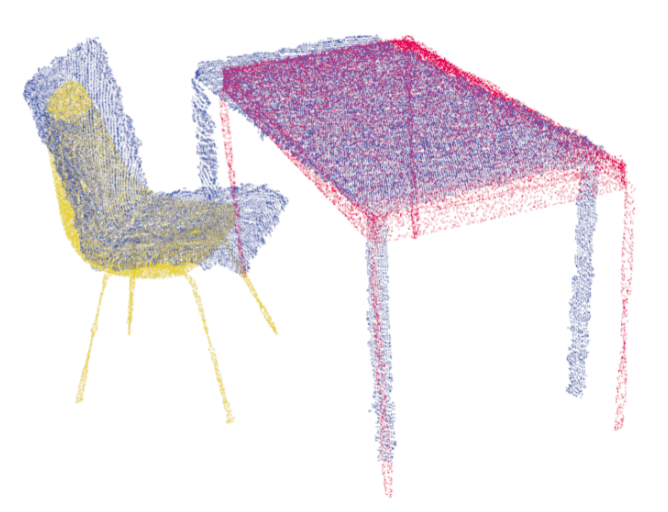
Furniture Classification using WWW CAD Models , In IROS'12 Workshop on Active Semantic Perception, 2012.
PhD Thesis
2019
[] 
Visual-Inertial Navigation for Autonomous Vehicles , PhD thesis, Technische Universität München, 2019. (library link, keywords=vslam,)
Teaching
Winter Semester 2018/2019:
- Practical Course: Vision-based Navigation
(6h / 10 ECTS)
Summer Semester 2018:
- Practical Course: Vision-based Navigation
(6h / 10 ECTS)
Winter Semester 2017/2018:
- Practical Course: Vision-based Navigation
(6h / 10 ECTS)
Winter Semester 2016/2017:
- Practical Course: Vision-based Navigation
(6h / 10 ECTS)
Winter Semester 2015/2016:
- Practical Course: Vision-based Navigation
(6h / 10 ECTS) - Selected student projects:
Summer Semester 2015:
- Practical Course: Vision-based Navigation
(6h / 10 ECTS) - Selected student projects:
Summer Semester 2014:
- Practical Course: Vision-based Navigation
(6h / 10 ECTS)


